ابتدا میتوانید یک ویدیو از این مطلب ببینید.
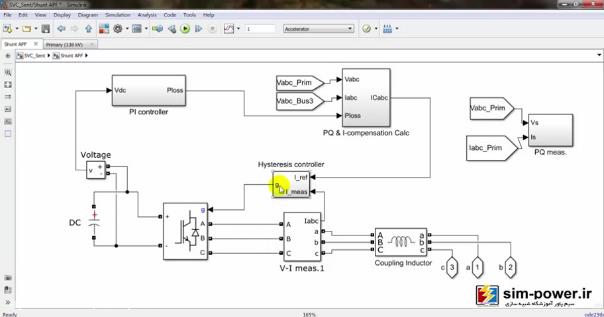
مدلی که من برای فیلتر اکتیو آماده کردهام مدلی است که در شکل میبینید:

این مدل تشکیل شده از یک Inverter…

که با استفاده از یک کنترلر هیسترزیس، هیسترزیس جریان، میآید و Gateها را آتش میکند و trigger میکند:

که خود این هم از یک P و Q تشکیل شده که آن را محاسبه میکند

و در ادامه در مورد هر کدام از این بلوکها توضیح خواهم داد.
PI Controller هم نمونهگیری را از ولتاژ انجام میدهد:
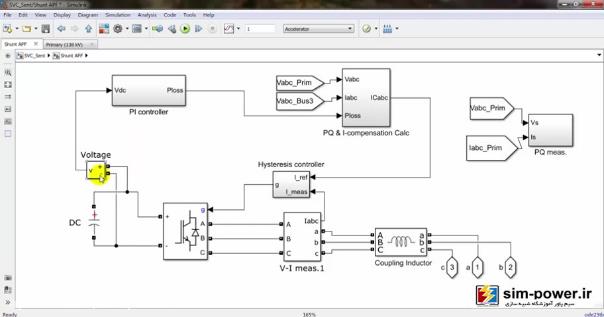
و این پروسه روی کنترلش برای زاویه آتش تریستورهایی هست که در این اینورتر انجام گرفته است:

اول درباره این اینورتر کمی توضیح بدهم؛ اینورتری که در شکل بالا مشاهده میکنید، اینورتری است که مقاومت موازی آن یک عدد بزرگی قرار گرفته، در حد 10٬000 اهم، که میشود آن را با نسبت خوبی اتصال باز در نظر گرفت:
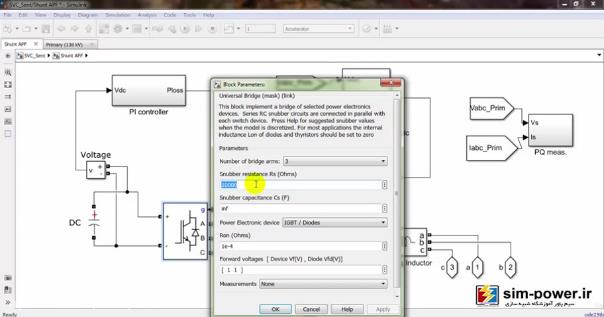
نوع device ما IGBT هست و البته خیلی هم فرقی نمیکند که Thyristors باشد یا IGBT:

و فقط در لحظات ابتدایی trigger شدنش مقداری تفاوت دارد.
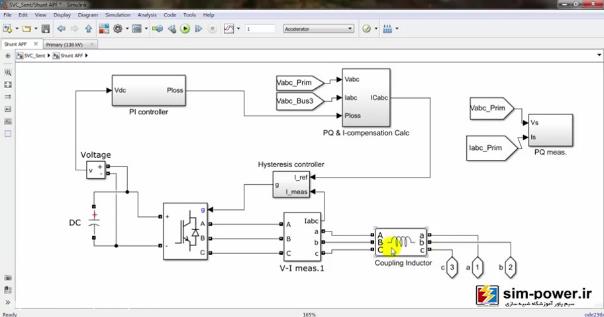
بعد از آن میآید با measurment انجام میشود و جریان از این measurment خارج میشود:

و در نهایت یک اینداکتور کوپلینگ یا سلف کوپلشده هم در اینجا به عنوان خروجی سیستم ما قرار گرفته است:
که این اندازهگیری با i_reference اندازهگیری میشود:

و اگر از i_reference کمتر باشد به صورت 1:

و اگر بیشتر باشد خروجی به صورت صفر است:

و این NOT هم برای این هست که اگر این سوییچ 1 را مثلاً برای ما روشن و خاموش میکند،

سوییچی که در همان لِگ یا در همان موضوع قرار دارد میآید و NOT سوییچ متقابلش را کلیدزنی و سوییچزنی میکند.
همینجور که در اینجا میبینید خروجیهای Vabc_Prime و Vabc_Bus3 را وارد این V و I میکنیم:

و در نهایت میبینید که کل سیستم ما، قسمت اصلی این سیستم فیلتر اکتیو ما، در این قسمت هست:


که اندازهگیریها را با استفاده از چهار تا Function انجام میدهد:

و هر کدام از اینها سپس u، v و w را به عنوان ورودی میگیرد و با استفاده از فرمولهایی که در خصوص تبدیل میکند:


و در نهایت P و Q را با استفاده از روابطی که در کتب مرجع هست محاسبه میکند:


و در نهایت با استفاده از اینها و یک سری رفرنسها را هم از اینجا:

به عنوان خروجی میگیرد و Ic را:

به عنوان رفرنس Hysteresis controller در نهایت میآید و با I_meas یا اندازهگیریشده مقایسه میکند:
و گیتها را همانجور که برای شما گفتم میآید و پالسهایش را به وجود میآورد و ولتاژ dc (Vdc) هم اینجا اندازهگیری میشود:
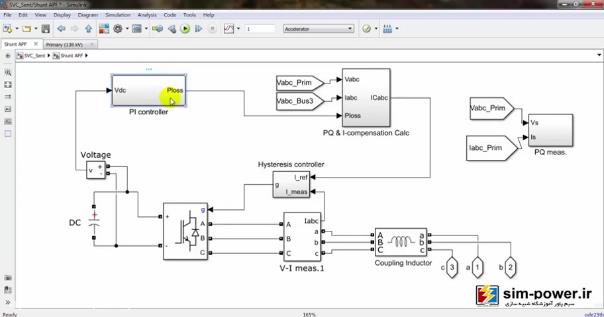
و وارد یک PI میشود:

که کنترل بر روی این PI هست و gain آن را برابر 0.1 گذاشتیم، به صورت تجربی:

این را آنقدر تغییر میدهیم تا بهترین gainای که به دست آمد 0.1 بود و Ki هم برابر 1. یک PI ساده را اینجا برای کنترل ولتاژ در نظر گرفتیم و این هم میآید و وارد این بلوک اصلی ما میشود:

و در نهایت این فیلتر برای ما شکل میگیرد، که این فیلتر را آمدیم و در این قسمت مدار:
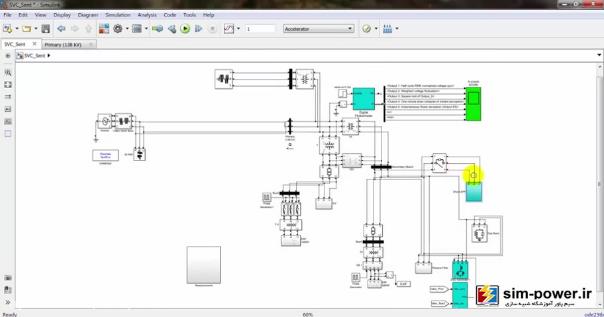
وارد کردیم:

و نتایج هم نشان میدهد که ما با وجود این فیلتر اکتیور Shunt:

خیلی بهبود خوبی را داشته است؛ در حد سی درصد ولتاژ کاهش پیدا کرده و همچنین به هیچ وجه این فیلتر ما باعث نمیشود که ما یک توان راکتیو را دوباره وارد مدار کنیم و همین باعث میشود که آن بهبودهایی که حاصل شده از سایر قسمتهای مدار، دست نخورند و در نهایت شبیهسازی ما تا حد زیادی بهبود پیدا کرده؛ البته قسمتهای دیگری از شبیهسازی را ما درستشان کردیم:


از این جهت که بعضی از این لیبلها اشتباه لیبلگذاری شده بود. مثل این labc را عوض کردیم:
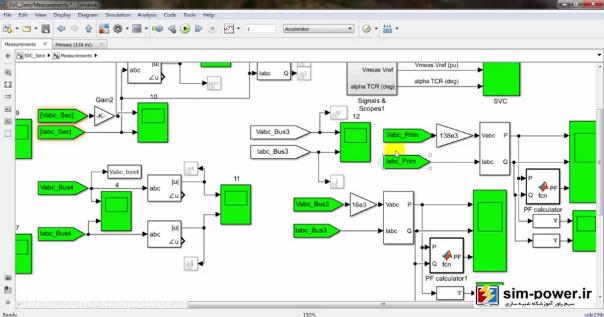
و همه اندازهگیریها را در این بلوک مجتمع کردیم:

و باسها را مقداری از هم جدا کردیم و جاهایی که مشکل داشت را به میزانی رفع کردیم.
اگر سوالی بود میتوانید از بنده بپرسید.