تحلیل یک نمونه سنسور موقعیت زاویه
با توجه به شباهت موقعیت سنجی زاویهاي مطلق در تمام ایدهها سـعی شـد تـا بـا ارائـه یـک
نمونه صنعتی، روش کلی این موقعیتسنجی توضیح داده شود.
این سنسور بر مبناي تکنولوژي CMOS عمل مـی کنـد . کـاربرد اصـلی ایـن سنـسور کنتـرل
میکروموتورها میباشد. این سنسور بر اساس اثر هال عمل میکند.
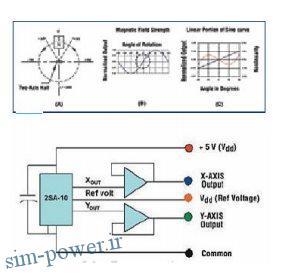
چهار سنسور هال بر یک قطعه سیکیلن قرار گرفته اند. هر عنصر بخشی از میدان مغناطیـسی
در ص فحه سنسور را احساس می کند. عناصر هال در چهار گوشه یک دیـسک فـرو مغناطیـسی قـرار
گرفتهاند و خروجیهاي Y – X را تولید میکنند. براي هر محور وجود یک عنصر هـال کـافی اسـت
ولی با قرار دادن 2 عنصر هـال در هـر محـور، دقـت افـزایش و آفـست کـاهش مـی یابـد . (از طریـق
اندازهگیري ولتاژهاي تفاضلی) خروجی عناصر هال X1 – X2 – Y1 – Y2 توسط یک مـدار بهـسازي
شامل بایاس، تقویتکننده و حذفکننده آفست و نیز پایدارسازي حرارتی پردازش میشود.

خروجی خطی بین 2V تا 2,5V در میدان به شدت (20mt 200G) مـی توانـد بـه دسـت آیـد .
درصد غیرخطی بودن سنسور کمتر از %0,1 است و هستیرزیس %0,03 میباشد. (تکرارپذیري خوب)
به دقت کمتر از 1 در رنج دمایی 60 تا 15 میتوانیم برسیم. در دمـاي پایـدار دقـت مـی توانـد
بهتر 0,2 میباشد.
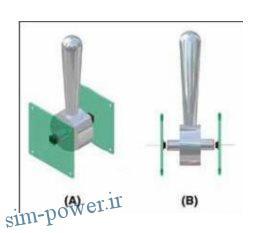
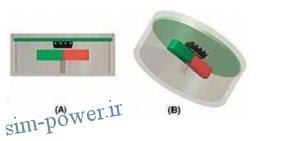
کاربرد این سنسور در تعیین موقعیت زاویه اي یک محور چرخنده اسـت . در ایـن مـورد، یـک
آهنرباي دائمی بر محور موتور در بالاي سنسور قرار می دهیم. ایـن آهنربـا یـک میـدان مغناطیـسی
موازي با سطح سنسور تولید می کند. این میدان به عنوان یک واسطه غیرتماس بین جهـت محـور و
سنسور عمل میکند.
معمولاً قطر آهنربا 1,5 mm و ابعاد سنسور 2 بعدي 3*1 mm است.
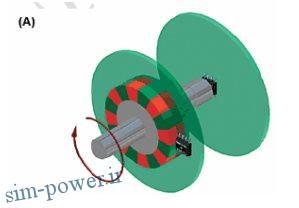
یک آهنرباي حلقهاي که بر شفت قرار گرفته است و بر بالاي سنسور میچرخد، نشان میدهد.
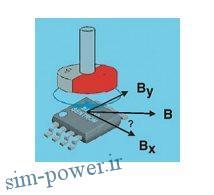
وقتی شفت می چرخد سنسور بردار مغناطیسی را احساس می کند و سیگنال هـاي vy و vx را
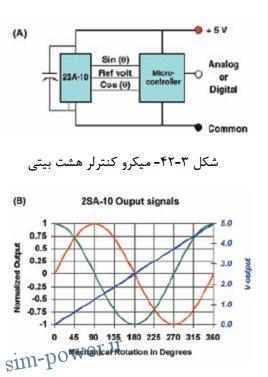
تولید می کند. این دو سیگنال سینوسی هستند و با هم 90 اختلاف فاز دارنـد . زاویـه ي چـرخش، بـا
محاسبهي آرك تانژانت تقسیم vy بر vx توسط یک میکروکنترلر 8 بیتی بدست میآید.
ین روابط بر کار ما حاکم هستند:
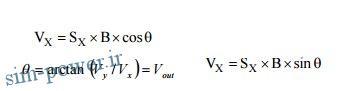
حساسیت سنسورهاي اثر هال با هم برابر است یعنی sx = sy = s خواهیم داشت:
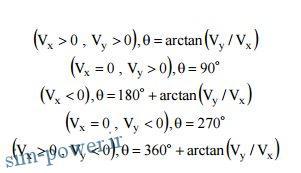
تابع معکوس تانژانت تابعی متناوب است که هر 180 تکرار می شود و بـازاي زوایـاي 180 و 90 و نیـز
بازاي vx = 0 بینهایت میگردد. با این پیشزمینه حالات زیر اتفاق میافتد:
کی از کاربردهاي این سنسور در موقعیت سنجی شیر میباشد. که آهنربا بر شفت داخلی قرار
گرفته است و سنسور در بیرون بر یک بدنه غیر فرومغناطیسی قرار گرفته است.

ز دیگر کاربردها میتوان Single – Anis joystick نام برد.
در یک 2 – Axis joystick ، یک سنسور 2 بعدي را در مرکز کـره اي کـه د سـته در آن تغییـر
موقعیت میدهد قرار میدهند و آهنربا را نیز بر انتهاي دسته قرار میدهند.

در این حالت سیگنال هاي خروجی vy و vx متناسب با بـردار میـدان مغناطیـسی مـی باشـد .
همانطور که شکل زیر نشان می دهد درصد غیرخطی سی نوسـی خروجـی در یـک بـاز 60 در اطـراف
نقطه صفر کمتر از 1% میباشد.
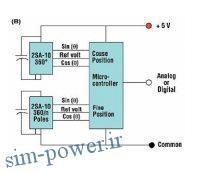
براي افزایش رزولوشن موقعیت چرخشی از IC 2 و نیز 2 آهنربا استفاده میکنند.
در این حالت یک اندازه گیري غیردقیق توسط یک IC و آهنرباي دوقطبـی انجـام مـی شـود و
اندازهگیري دقیق توسط یک آهنرباي حلقهاي N قطبی و IC دوم انجام میپذیرد.
این آهنرباي چندقطبی باعث تولید N موج سینوسی و کسینوسی در هر دور میشود.
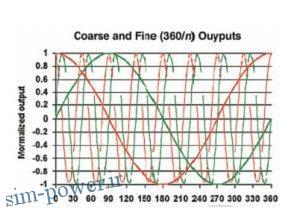
با فرض ای نکه هر سیگنال خروجی داراي رزولوشـن 0,1 باشـد، رزولوشـن نهـایی در هـر دور
برابر 0.1/ n 0.1/ 8 0.0125 می شود. اطلاعات بدست آمده از ایـن آهنربـاي چنـدقطبی جهـت
تعیین این که کدام قطاع از آهنرباي حلقه اي در برابر سنسور قرار گرفته است اسـتفاده مـی شـود . در
این روش دقت ن یز 1/n می شود. سیگنالهاي بدست آمده دقیق و غیردقیـق در نهایـت توسـط یـک
میکروکنترلر براي تولید خروجی دقیقتر پردازش میشوند.
کاربرد دیگري نیز در قطبنماي الکترونیکی وجود دارد.
آهنربا بگونه اي در برابر IC قرار می گیرد که براحتی و آزادانه میتواند حرکت کنـد . آهنربـا بـا
توجه به جهت میدان مغناطیسی زمین می چرخـد، میـدان مغناطیـسی تولیـد مـی کنـد کـه بـسیار
شدیدتر از میدان مغناطیسی زمین (در حد 600 mt) میباشد. بنابراین IC با تاثیر میدان مغناطیسی
قــويتــر ســیگنالهــاي خروجــی vx و vy را تولیــد مــیکنــد. در ایــن حالــت نیــز میکروکنترلــر
![]() را تولید خواهد نمود.
را تولید خواهد نمود.
کاربردهای ویژه
Special application
در سال هاي اخیـر سنـسورهاي مغناطیـسی بـه خـصوص AMR کـاربرد وسـیعی در GPS و
سیستمهاي ناوبري و کنترل ترافیک داشته است.
توضیحات مختصري درباره ي این کاربردها آمـده اسـت . مراجـع اصـلی بـه طـور کامـل گویـا
میباشند.