
سنسور رزولور از دسته سنسورهای القایی و مدارات بهسازی
رزولور
رزولورها نوعی از سینکروها هستند که امروزه کاربرد وسیعی در صـنایع مختلـف دارنـد . ایـنسنسورها به علت ساختمان خاص داخلی خود در محیط هاي صن عتی و آلوده، بـه جـاي انکودرهـاينوري استفاده میشوند.
همچنین با توجه به این که ساخت سینکرو نسبت به رزولور مشکل تر بوده و در نتیجه گران ترخواهد بود لذا سینکروها امروزه بیشتر در صنایع نظامی دقیق و ویـژه اسـتفاده مـی شـوند و کـاربردرزولورها گسترده تر است.
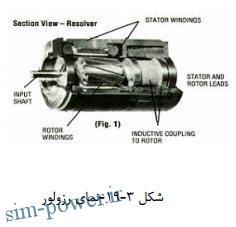
ساختمان
رزولورها نوعی از سینکروها هستند با این تفاوت که در روتور و استاتور آن هـا دو سـیم پیچـیعمود بر هم وجود دارد . با تحریک یکی از سیمپیچیهاي روتور و یا استاتور، بـه ترتیـب در اسـتاتور ویا روتور ولتاژي متناسب با سینوس زاویهي میان روتور و استاتور ایجاد میگردد.مثلاً اگر سیمپیچی روتور تحریک شود خواهیم داشت.
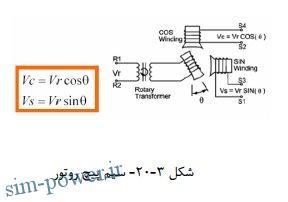
علت نام گذاري این سنسورها نیز بر همین مبنا است . زیرا این ماشینها ولتاژ مرجـع را بـه دومولفه عمود بر هم و تجزیه می نمایند که اگر در روتور رزولورها از یک سیمپیچی استفاده شـود، ایـنتجزیه تنها در یک جهت صورت می گیرد و در صورت استفاده از دو سیمپیچی در دو جهت تجزیـه يولتاژ خواهیم داشت.
علاوه بر تعیین موقعیت زاویه اي توسط رزولورها می تـوان از آن هـا در جهـت عکـس اسـتفادهنمود یعنی با اعمال مولفه هاي ولتاژ به استاتور این ماشینها، میتوان ولتاژ مرجع همـراه بـا زاویـه يآن را بدست آورد.
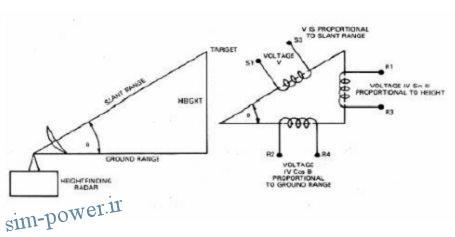
همچنین از رزولورها جهت تغییر مختصات از یک دستگاه به دستگاه مختصات دیگر اسـتفادهمیشود، مثلاً با استفاده از مدار زیر میتوان با انتقال دستگاه مختصات ارتفاع رادار را تعیین نمود:
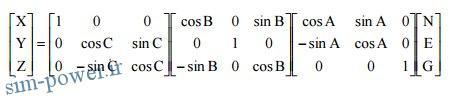
از رزولورها جهت تغییر مختصات سه بعدي نیز استفاده می شود که در این صـورت روابـط بـهصورت زیر درخواهند آمد:
مدارات بهسازی
بـراي اسـتخراج زاویـه، از یـک مبـدل (RCD (Resolver to Digital Converter اسـتفادهمینمائیم.
انواع روشهاي RTD یا RDC
روش Tracking
روشهاي DSP
روش Under Sampling
روش Over Sampling
روش Tracking
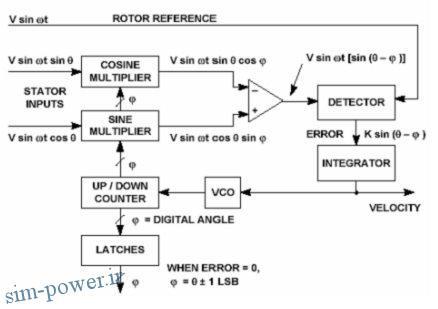
همانطور که مشاهده میشود این مبدل از اجزاي زیر تشکیل شده است.
1- ضربکننده سینوس و کسینوس
2- مقایسه کننده (تقویت کننده تفاضلی)
3- آشکارساز یا دمدولاتور
4- انتگرالگیر
5- نوسانساز
6- شمارنده
لچ (LATCH)
میتوان این سیستم را به صورت یک سیـستم حلقـه بـسته در نظـر گرفـت کـه ورودي ایـنسیستم زاویه یا همان زاویه ي روتور و خروجی آن مقدار نشان دهندهي Latch میباشد. با توجـه بـهاینکه در این سیستم خطاي حالت مانگار صفر خواهد بود (به واسطهي وجـود انتگـرال گیـر ) نهایتـاًمقدار نشان داده شده توسط Latch یعنی ، با مقدار ورودي یعنی، برابر خواهد شد.
این سیستم داراي دو حلقه انتگرال گیر می باشد. یکی از انتگر الگیرها، شمارنده می باشـد کـهپالس تولید شده توسط نوسان ساز را میشـمارد و دیگـري یـک انتگـرال گیـر اسـت کـه از خروجـیآشکارساز انتگرال میگیرد.
در این روش با داشتن یک سرعت ثابت، خروجـی دیجیتـالی، ورودي را دنبـال خواهـد نمـودبدون آنکه نیازي به مدار خارجی جبرانساز پساز، میان خروجی دیجیتال و شفت رزولور باشد.
یکی دیگر از مزایاي RDC هاي دنبال کننده
یکی دیگر از مزایاي RDC هاي دنبال کننده آن است می توان از طریق آن ها سـرعت شـفت رانیز اندازه گیري نمود در واقع ولتاژ خروجی انتگرال گیر، مقداري متناسـب بـا سـرعت شـفت خواهـدداشت بدین ترتیب در مواردي که نیازمند استفاده از اطلاعات سـرعت مـی باشـیم مـی تـوان از ایـنسیستم جهت اندازه گیري توام سرعت و موقعیت استفاده نمـود بـدون آن کـه نیـازي بـه اسـتفاده ازتاکومتر داشته باشیم.
از آن جائیکه در این مبدل از دو حلقه انتگرالی استفاده شده است، این سیستم در مقابل نـویزایمنی بالایی دارد (تضعیف نویز/ 12 dB) زیرا نویزهاي القـائی معمـولاً داراي قـسمت هـاي مثبـت ومنفی برابري هستند، وجود انتگرالگیر باعث میشود که نویز به طور کلی حذف گردد.
مقاوم بودن ایـن سیـستم در مقابـل نـویز سـبب مـی گـردد کـه دیگـر نگـران افـت ولتـاژ درمسافتهاي طولانی نبوده لذا می توان مبدل ر ا با فاصـله ي زیـادي نـسبت بـه رزولورهـا قـرار داده وپردازش اطلاعات را در فاصلهي دورتري نسبت به سنسور انجام دهیم.ضمناً حذف نویز در تمام فرکانسها صورت میگیرد و لذا میتوان اثر نویز را حذف نمود.
روش DSP
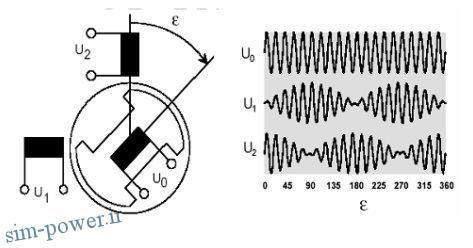
هنگامی که روتور میچرخد، دامنهي سیگنال ورودي و خروجی به صورت زیر میباشد:
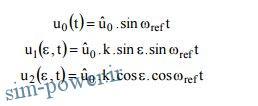
که در این رابطه k ، نسبت تبدیل ترانسفورماتور رزولور میباشد.
طیف فرکانسی دامنه سیگنالهاي خروجی به صورت زیر میباشد.
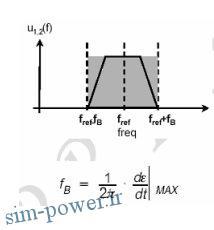
همانطور که دیده می شود. سیگنالهاي و![]() cos با سیگنال مرجع sin
cos با سیگنال مرجع sin ![]() t مدوله میشود، لذاباید به طریقی سیگنال هاي خروجی را دمدوله کرد تا بتوان از روي آنها اطلاعات مربوط به زاویـه رابدست آورد.
t مدوله میشود، لذاباید به طریقی سیگنال هاي خروجی را دمدوله کرد تا بتوان از روي آنها اطلاعات مربوط به زاویـه رابدست آورد.
روش Under Sampling
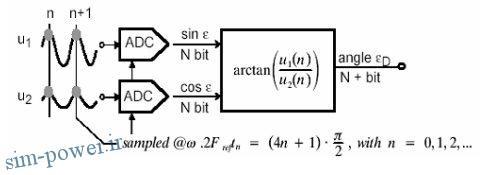
در این روش از سیگنال هاي V1 و V2 خروجـ ی بـا فرکـانس سـیگنال مرجـع نمونـه بـرداري میشود و با این کار V1 و V2 دمدوله میشوند. بدین ترتیب مقادیر (U1(n و (U2(n همـان مقـادیر sin و cos ![]() خواهند بود . مقادیر نمونه برداري شده توسط یک مبدل A/D ، وارد یـک پردازشـگر شده و توس ط این پردازشگر مقدار
خواهند بود . مقادیر نمونه برداري شده توسط یک مبدل A/D ، وارد یـک پردازشـگر شده و توس ط این پردازشگر مقدار![]() محاسبه و با توجه به علامـت سـیگنال U2 عملیـات زیر صورت میگیرد.
محاسبه و با توجه به علامـت سـیگنال U2 عملیـات زیر صورت میگیرد.
براي این که سیستم از دقت کافی برخوردار باشد، باید سیگنال هاي U1 و U2 بـه طـور کـاملاًهمزمان نمونه برداري شوند و یا این که هموار ه نزدیک ترین مقدار آن ها به مقدار ماکزیممشان در نظرگرفته شود . براي ADC با N بیت، دقت زاویه بدست آمده N+1 بیت خواهد بود . به عنوان نمونـه درسیستم TMS320F 240 ، که داراي ADC هاي 10 بیتی مـی باشـد دقـت زاویـه ي انـدازه گیـري 10دقیقه میباشد.
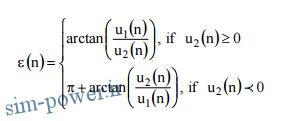
روش Over Sampling
براي داشتن دقت بالاتر و حذف نویز بیـشتر نـسبت بـه روش Over Sampling از ایـن روش استفاده مـی شـود . در ایـن روش از سـیگنال هـاي V1 و V2 بـا فرکـانس بیـشتر از فرکـانس مرجـع نمونهبرداري می نمائیم. طبق شکل این فرکانس 2K برابر فرکانس مرجع در نظر گرفته شـده اسـت .
پس از آن این سیگنال ها از یک FIR میان گذر عبور داده می شوند و سـپس یـک تقـسیم فرکـانس 2K:1 صورت می گیرد و در واقع تنها مقادیر 2K ام نمونه برداري شده در نظر گرفته می شود و بـدین ترتیب![]() sin و بدست خواهد آمد و پس از آن مقدار
sin و بدست خواهد آمد و پس از آن مقدار![]() محاسبه میگردد.
محاسبه میگردد.
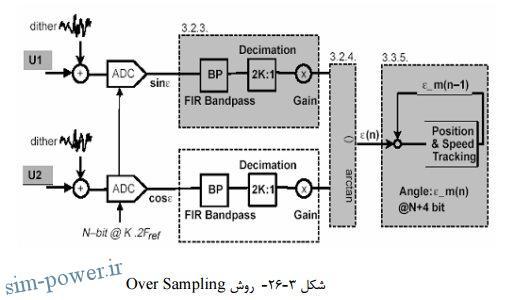
براي بهبود در رزولوشن، از یک حلقه فیدیک سرعت و موقعیت مطابق شکل استفاده میشود.که مقدار افزایش رزولوشن با این روش بستگی به پهناي باند سیستم حلقه بسته دارد . مزیـتدیگر این حلقه، جبران کردن دسته تاخیرات ناشی از فیل تر FIR میانگذر میباشد. بدین ترتیـب بـااستفاده از این روش میتوان بدون نیاز داشتن پس فاز سرعت، رزولوشن را افزایش داد.
این کنترل کننده داراي 2 مبدل 10 بیتی می باشد که به طور همزمـان از سـیگنال هـاي U1 وU2 نمونه برداري می کنند. همچنین این سیستم توسط یـک کانـال PWM قـادر بـه سـاخت ولتـاژسینوسی مرجع میباشد.
به طور کلی میتوان ویژگیهاي این سیستم را به صورت زیر خلاصه نمود:
1- قابلیت تولید سیگنال مرجع سینوسی (Event Manager)
2- نمونه برداري همزمـان از سـیگنال هـاي V1 و V2 و بـا همـان فرکـانس سـیگنال مرجـع
(Event Manager ADC)
3- استفاده از الگوریتم بهبود یافته جهت تعیین زاویه (CPU)
4- رزولوشن بیش از 14 بیت
ویژگی رزولورها
از جمله قابلیت هاي بالاي آن می توان به رزولوشن بسیار بـالا، دقـت خـوب، مقـاوم در مقابـلنویز، قابلیت اطمینان بالا مخصوص اً در محیط هـاي صـنعتی و آلـوده مقـاوم بـودن در مقابـل درجـهحرارت و کوچکی آنها اشاره نمود.
ضمناً رزولورها موقعیت مطلق را اندازه گیري می نمایند در نتیجه با قطع برق اطلاعات آن ها ازبین نخواهد رفت.
همچنین نوع بدون جاروبک رزولورها وجود دارد که در این نوع، روتور آن ها یک ترانـسفور دراین نوع سیم پیچی روتور در واقع سیم پیچی ثانویه ترانسفورماتور بوده و ولتـاژ آن توسـط سـیم پـیچاولیه، و بدون تماس الکتریکی تامین میگردد. لذا در این نوع مشکلات جاروبک را نخواهیم داشت.
اکثر رزولورها با ولتاژ مرجع 2 تا 40 ولت (RMS) و در فرکانس 400 هرتـز تـا 10 کیلـو هرتـزکار میکنند، و دقت آنها از 5 arcmin تا 0/5 arcmin میباشد. (هر دقیقه 0/0167 درجه میباشد.)
همچنین رزولور در مقایسه با انکودر نوري نسبت به نویز بسیار مقاومتر است.
تکنولوژی رزولورها
رزولورهاي بدون جاروبکدر این نوع سیم پیچی روتور در واقع سیم پیچی ثانویه ترانسفورماتور بوده و توسـط سـیم پـیچاولیه و بدون تماس الکتریکی ولتاژ در آن القا می شود. لذا در این نوع مشکلات جاروبک را نخـواهیمداشت.
Rotasyn
در نوع پیشرفته رزولورها، روتور سیم پیچی ندارد . در این رزولورها، سیمپیچـی اولیـه و ثانویـههر دو در استاتور واقعند. روتور از جنس حالت جامد (Solid State) بوده و ولتاژ آن از طریـق القـايمغناطیسی ترانسفورماتور واقع در استاتور تامین میگردد.
Duracoder
این رزولور که ساخت شرکت AMCI می باشد، از نظـر قیمـت هماننـد انکودرهـاي نـوري، ازرزولورهاي دیگر ارزانتر بوده و همچنین قابلیت کار در محیطهاي صنعتی و آلوده را دارد.
-کاربرد رزولورها و برخی نمونه ها
مقایسه سینکروها و رزولورها از نظر کاربردي :
همانطور که اشاره شد سینکرو و رزولور عملکرد مشابهی داشته، لذا کاربرد یکسانی در صنعت دارنـداما با ت وجه به این که سینکرو در ساختمان خود داراي سه اسـتاتور بـا زاویـه 120 درجـه نـسبت بـهیکدیگر می باشد ساخت آن نسبت به رزولور مشکل تر خواهد بود و در نتیجـه گـران تـر خواهـد بـود .
ضمناً به علت مشکل بودن تبدیل ولتاژ سه فاز به موقعیت در سینکروها، این مبدل ها امـروزه بیـشتردر صنایع نظامی دقیق و ویژه استفاده می شوند، در حـالی کـه رزولورهـا کـاربرد وسـیعی در صـنایعمختلف از جمله ماشین افزارها، سیستمهاي نظامی، روباتیک و… دارند.






