توجه كنيد كه ورودي بلوك Constraint Algebraic تابع و خروجي آن مقداري است كه به ازاي آن تابع ورودي صفرخواهد شد و به همين دليل است كه از خروجي اين بلوك براي تغذيه آرگومانهاي تابع ورودي استفاده شده است.
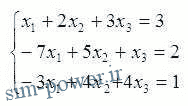
براي مثال آخر در قسمت دوم آموزش ميخواهيم دستگاه معادلات زير را حل كنيم
نياز:
Simulink >> Sources >> Constant Simulink >> Sinks >> Display
Simulink >> Math Operations >> Sum
Simulink >> Math Operations >> Gain
Simulink >> Math Operations >> Algebraic Constraint
بلوك هاي خواسته شده را به تعدادي كه در شكل زير مشاهده مي كنيد آورده و مانند شكل آنها را مرتب كنيد:
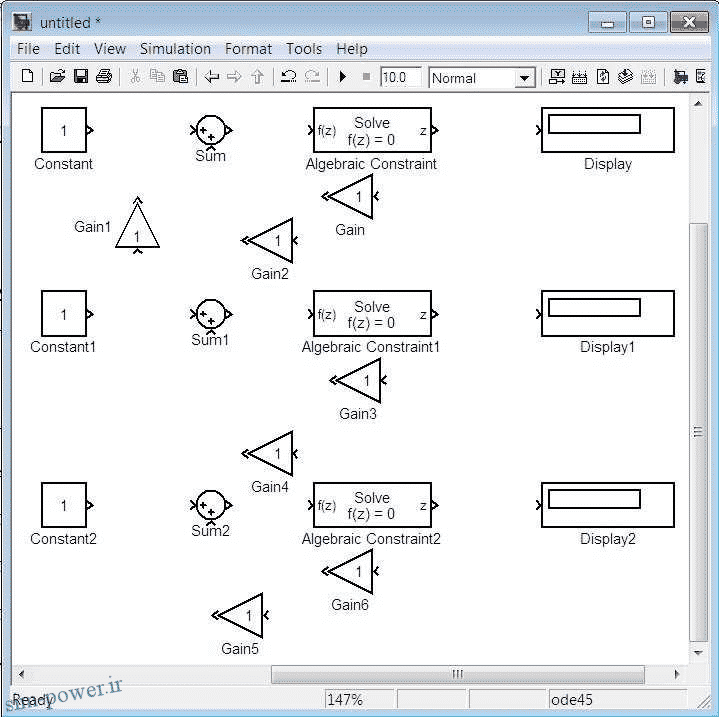
نكته: بلوك ها را ميتوانيد به وسيله فشردن كليدهاي Ctrl+R بچرخانيد.
تنظيمات بلوك ها:
• روي بلوك Constant دوبار كليك نموده و مقدار آن را 3 قرار دهيد.
• روي بلوك Constant1 دوبار كليك نموده و مقدار آن را 2 قرار دهيد.
• روي بلوك Gain دوبار كليك نموده و مقدار آن را 2 قرار دهيد.
• روي بلوك Gain1 دوبار كليك نموده و مقدار آن را 3 قرار دهيد.
• روي بلوك Gain2 دوبار كليك نموده و مقدار آن را 7 قرار دهيد.
• روي بلوك Gain3 دوبار كليك نموده و مقدار آن را 5 قرار دهيد.
• روي بلوك Gain4 دوبار كليك نموده و مقدار آن را 3 قرار دهيد.
• روي بلوك Gain5 دوبار كليك نموده و مقدار آن را 4 قرار دهيد.
• روي بلوك Gain6 دوبار كليك نموده و مقدار آن را 4 قرار دهيد.
• روي بلوك Sum دوبار كليك نموده و در قسمت List of signs علامت هاي ++- +| را وارد كنيد.
• روي بلوك Sum1 دوبار كليك نموده و در قسمت List of signs علامت هاي ++– | را وارد كنيد.
• روي بلوك Sum2 دوبار كليك نموده و در قسمت List of signs علامت هاي ++– | را وارد كنيد.
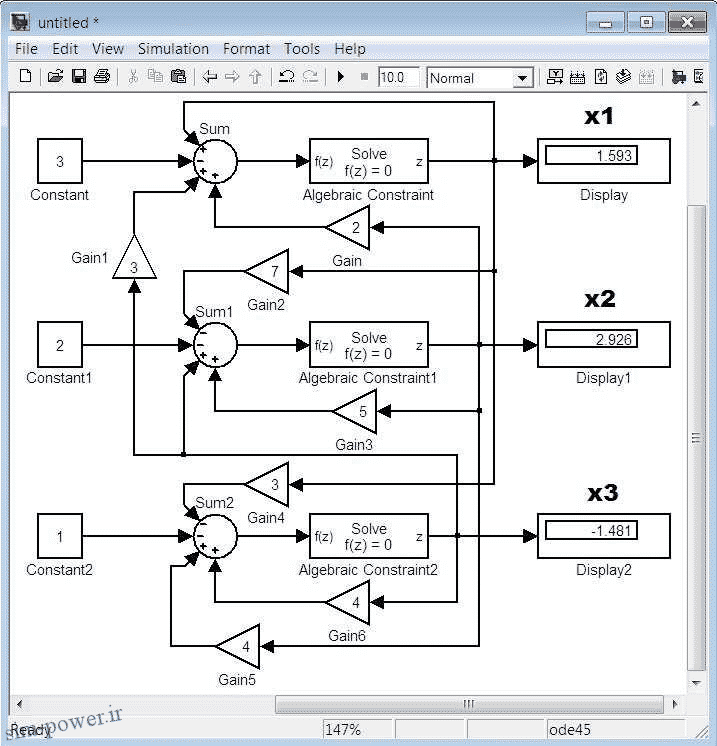
• اگر مي خواهيد خروجي را با دقت بالاتري ببينيد، روي بلوك هاي Display دوبار كليك كرده و فرمتنمايش آنها را long انتخاب كنيدحالا مي توانيد مدلتان را Run كرده و جواب دستگاه معادلات مربوطه را مشاهده كنيد:
اگر سؤالي داشتيد ميتوانيد در بخش نظرات آن را مطرح كنيد.
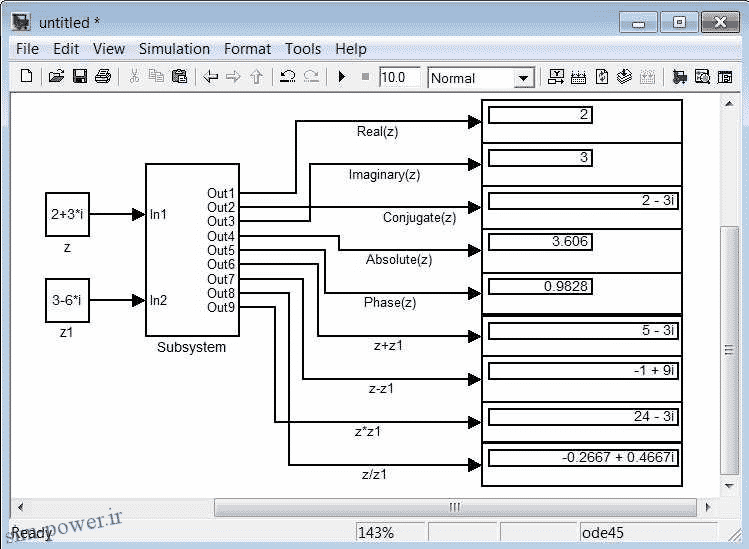
قسمت سوم آموزش رو با مثالي از اعداد مختلط شروع ميكنيم ميخواهيم سيستمي طراحي كنيم كه دو عدد مختلط را گرفتهو چهار عمل اصلي رياضي)جمع، تفريق، ضرب، تقسيم( را روي آن دو انجام دهد و همچنين قسمت حقيقي، قسمت موهومي،اندازه، فاز و مزدوج يكي از آن دو عدد را محاسبه كند توجه داشته باشيد كه هدف از اين مثال يادگيري كار با اعداد مختلط ونحوه ايجاد زير سيستم است.
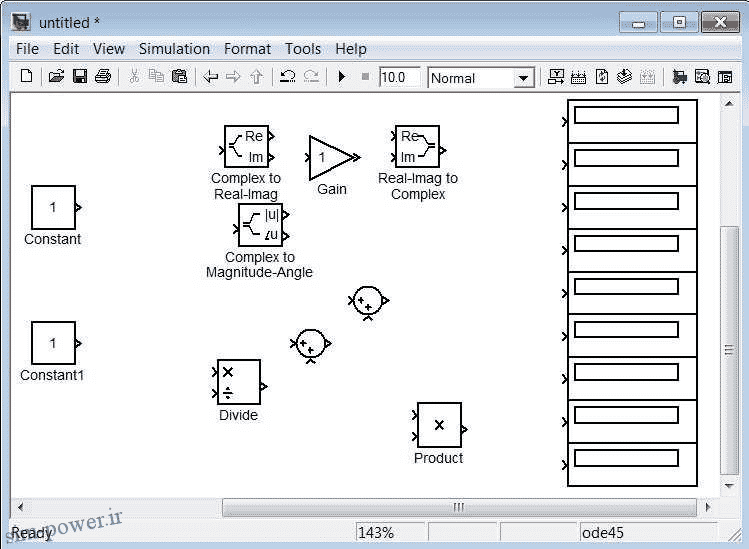
طبق معمول ابتدا يك پنجره جديد باز كرده و بلوكهاي مورد نياز را از مسيرهاي زير وارد ميكنيد:
Constant << Sources << Simulink
Display << Sinks << Simulink
Sum << Math Operations << Simulink
Gain << Math Operations << Simulink
Product << Math Operations << Simulink Divide << Math Operations << Simulink to Real-Imag Complex << Math Operations << Simulink to Complex Real-Imag << Math Operations << Simulink to Magnitude-Angle Complex << Math Operations << Simulink :بلوك ها را مانند شكل زير مرتب كنيد
تنظيمات بلوك ها:
• روي بلوك Constant دوبار كليك نموده و مقدار آن را 3 + 2i و نام آن را z قرار دهيد.
• روي بلوك Constant1 دوبار كليك نموده و مقدار آن را 6 – 3i و نام آن را z1 قرار دهيد.
• روي بلوك Gain دوبار كليك نموده و مقدار آن را 1 – قرار دهيد.
• روي بلوك Sum1 دوبار كليك نموده و در قسمت List of signs علامت هاي -+| را وارد كنيد.
• روي بلوكهاي Display كليك راست نموده و از مسير Hide Name << Format نام بلوكها را پنهانكنيد حالا مانند شكل بلوكها را به يكديگر متصل كنيد:

سپس تمامي بلوكها بهجزء بلوكهاي Constant و Display را انتخاب و كليك راست كنيد و از منوي باز شده Create Subsystem را انتخاب كنيد حالا مدلتان احتمالا كمي بهم ريخته شده است كمي آن را مرتب كنيد و بلوك Subsystemرا از دو طرف بكشيد تا بزرگتر شود برخي از بلوك هاي Display نيز احتياج به بزرگترشدن دارند كه اين را بعد از شبيه سازيخواهيد فهميد.
اكنون سيستم شما آماده شده و ميتوانيد آن را Run كنيد:
مثالی دیگر در این محیط
در اين مثال با نحوهي ايجاد زيرسيستم آشنا شديد شما مي توانيد زير سيستمهاي مختلفي در يك مدل)حتي زيرسيستمهايتودرتو( ايجاد كنيد زيرسيستمها را معمولا براي مدلهاي پيچيده و شلوغ بهكار ميبرند و با دوبار كليك كردن بهروي هركدام از آنها، محتويات آن مشاهده خواهد شد.
در مثال بعدي مي خواهيم پاسخ پله و پاسخ ضربه يك سيستم كنترلي را مشاهده كنيم تابع تبديل سيستم به شرح زير است
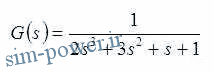
اين سيستم درجه 3 است و اگر پاسخ پله آن را رسم كنيم خواهيم ديد كه پاسخ زيرميرا)سينوسي ميراشونده( م يباشد ضمنامي خواهيم خروجي را در دو حالت)پاسخ پله و ضربه( به فضاي كاري MATLAB انتقال دهيم.
بلوك هاي مورد نياز:
Step << Sources << Simulink Scope << Sinks << Simulink To Workspace << Sinks << Simulink
Derivative << Continuous << Simulink
Fcn Transfer << Continuous << Simulink
بلوك ها را مانند شكل زير مرتب كنيد

تنظيمات بلوك ها:
• روي بلوك Step دوبار كليك نموده و مقدار time Step را 0 قرار دهيد
• روي بلوك Transfer Fcn دوبار كليك نموده و مقدار Denominator coefficients را 2 3 1 1] [ قرار دهيد
• روي بلوك Scope دوبار كليك نموده و سپس به منوي Parameters رفته و تعداد محورها را برابر 2 قرار دهيد
• روي بلوك To Workspace دوبار كليك نموده و در قسمت Variable name عبارت s را وارد كرده و در قسمتSave format حالت Array را انتخاب كنيد
• روي بلوك To Workspace1 دوبار كليك نموده و در قسمتVariable name عبارت h را وارد كرده و در قسمت Save format حالت Array را انتخاب كنيد
تنظيمات مدل:
با فشردن كليد Ctrl+E به صفحه تنظيمات رفته و مانند شكل زير عمل كنيد:
اتصالات را به صورت زير انجام دهيد
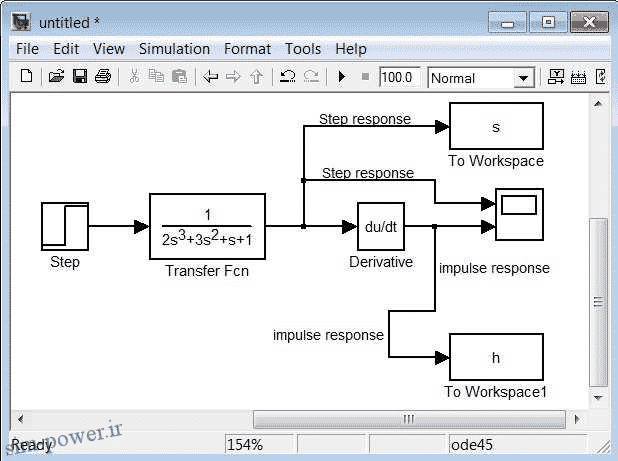
حالا Run كنيد:
