
آونگ معکوس: تحلیل، طراحی و پیادهسازی با MATLAB و SIMULINK
﷼1.850.000
توضیحات
این مجموعه شامل توابع و اسکریپتهای MATLAB و مدلهای SIMULINK است که برای تحلیل سیستم آونگ معکوس و طراحی سیستم کنترل آن مفید هستند.
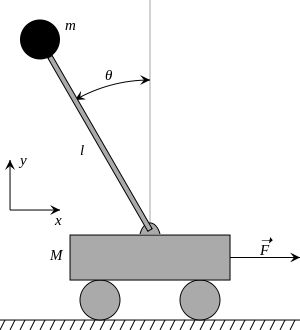
آونگ معکوس یکی از مهمترین مسائل کلاسیک مهندسی کنترل است. تعادل جارو (آونگ معکوس روی یک چرخ) نمونهای شناخته شده از یک مسئله کنترل غیرخطی و ناپایدار است. این مسئله زمانی پیچیدهتر میشود که به جای یک جاروی صلب، از یک جاروی انعطافپذیر استفاده شود. درجه پیچیدگی و دشواری در کنترل آن با انعطافپذیری آن افزایش مییابد. این مسئله مورد توجه محققان مهندسی کنترل بوده است. با این حال، در این مجموعه، ما آونگ معکوس را فقط با جاروی صلب تحلیل کردهایم.
هدف از این مطالعه، تثبیت آونگ معکوس به گونهای است که موقعیت ارابه روی مسیر به سرعت و به دقت کنترل شود تا آونگ همیشه در موقعیت معکوس خود در طول این حرکات قرار داشته باشد.
آونگ معکوس (IP) یکی از دشوارترین سیستمها برای کنترل در زمینه مهندسی کنترل است. به دلیل اهمیت آن در زمینه مهندسی کنترل، این وظیفه به دانشجویان مهندسی کنترل محول شده است تا مدل آن را تحلیل کرده و یک جبرانساز خطی مطابق با قانون کنترل PID پیشنهاد دهند.
کار انجام شده در این مجموعه در آزمایشگاه ابزار دقیق و کنترل مؤسسه مهندسی الکترونیک صنعتی، کراچی، پاکستان انجام شده است.
نویسنده مایلم از دکتر کن داتون [دانشکده مهندسی، دانشگاه شفیلد هالام، انگلستان؛ نویسنده: “هنر مهندسی کنترل”] برای بررسی این مجموعه تشکر کنم.
توضیحات جامع و جزئیات بیشتر:
این مجموعه ابزاری ارزشمند برای دانشجویان، محققان و مهندسان کنترل است که به مطالعه و طراحی سیستمهای کنترل برای آونگ معکوس میپردازند. در ادامه به بررسی دقیقتر اجزای این مجموعه و نکات مهم مربوط به آن میپردازیم:
1. توابع و اسکریپتهای MATLAB:
این توابع و اسکریپتها ابزارهای قدرتمندی برای تحلیل رفتار آونگ معکوس، مدلسازی دینامیکی سیستم، طراحی کنترلکنندهها و شبیهسازی عملکرد سیستم فراهم میکنند. برخی از کاربردهای این توابع و اسکریپتها عبارتند از:
- مدلسازی ریاضی: استخراج معادلات دیفرانسیل حاکم بر سیستم آونگ معکوس و تبدیل آنها به فرم مناسب برای تحلیل و شبیهسازی در MATLAB.
- تحلیل پایداری: بررسی پایداری سیستم آونگ معکوس با استفاده از روشهای مختلف مانند تحلیل قطبها، معیار راث-هورویتز و غیره.
- طراحی کنترلکننده: طراحی کنترلکنندههای مختلف برای تثبیت آونگ معکوس و بهبود عملکرد سیستم، از جمله کنترلکنندههای PID، LQR، MPC و غیره.
- شبیهسازی: شبیهسازی رفتار سیستم آونگ معکوس با استفاده از مدلهای ریاضی و کنترلکنندههای طراحی شده در MATLAB و بررسی عملکرد آنها.
2. مدلهای SIMULINK:
مدلهای SIMULINK یک محیط گرافیکی برای شبیهسازی سیستمهای دینامیکی فراهم میکنند. این مدلها به کاربران اجازه میدهند تا به راحتی سیستم آونگ معکوس را مدلسازی کرده و کنترلکنندههای طراحی شده را به آن اضافه کنند. برخی از مزایای استفاده از مدلهای SIMULINK عبارتند از:
- مدلسازی آسان: ایجاد مدلهای پیچیده از سیستمهای دینامیکی با استفاده از بلوکهای آماده و اتصال آنها به یکدیگر.
- شبیهسازی تعاملی: مشاهده و بررسی رفتار سیستم در طول شبیهسازی و تغییر پارامترهای مختلف برای بهبود عملکرد سیستم.
- طراحی کنترلکننده: طراحی و پیادهسازی کنترلکنندههای مختلف با استفاده از بلوکهای SIMULINK و تنظیم پارامترهای آنها.
3. آونگ معکوس:
آونگ معکوس یک سیستم کنترل کلاسیک است که به دلیل ناپایداری ذاتی خود، چالشهای زیادی را برای طراحان سیستمهای کنترل ایجاد میکند. هدف از کنترل آونگ معکوس، تثبیت آن در موقعیت عمودی و کنترل دقیق و سریع موقعیت ارابه حامل آن است. این سیستم به دلیل کاربردهای فراوان در صنایع مختلف مانند رباتیک، هوافضا و سیستمهای حملونقل، همواره مورد توجه محققان و مهندسان کنترل بوده است.
4. کنترل PID:
کنترل PID یکی از پرکاربردترین روشهای کنترل در صنعت است. این کنترلکننده با استفاده از سه پارامتر تناسبی، انتگرالی و مشتق، سعی در بهبود عملکرد سیستم و کاهش خطای حالت ماندگار دارد. کنترل PID به دلیل سادگی و کارایی بالا، اغلب به عنوان اولین گزینه برای کنترل سیستمهای مختلف، از جمله آونگ معکوس، مورد استفاده قرار میگیرد.
5. اهمیت آونگ معکوس در آموزش مهندسی کنترل:
آونگ معکوس به عنوان یک مسئله چالشبرانگیز و در عین حال آموزنده، نقش مهمی در آموزش مهندسی کنترل ایفا میکند. دانشجویان با مطالعه و طراحی سیستم کنترل برای آونگ معکوس، با مفاهیم اساسی کنترل، روشهای تحلیل پایداری، طراحی کنترلکننده و شبیهسازی سیستمهای دینامیکی آشنا میشوند.
6. مروری بر نکات کلیدی:
- این مجموعه شامل توابع و اسکریپتهای MATLAB و مدلهای SIMULINK برای تحلیل و کنترل آونگ معکوس است.
- آونگ معکوس یک سیستم کنترل کلاسیک و چالشبرانگیز است که به دلیل ناپایداری ذاتی خود، نیاز به طراحی دقیق کنترلکننده دارد.
- کنترل PID یکی از روشهای پرکاربرد برای کنترل آونگ معکوس است.
- این مجموعه ابزاری ارزشمند برای دانشجویان، محققان و مهندسان کنترل است که به مطالعه و طراحی سیستمهای کنترل برای آونگ معکوس میپردازند.


نقد و بررسیها
هنوز بررسیای ثبت نشده است.