ابتدا میتوانید یک ویدیو از این شبیه سازی را ببینید.
مقاله ای که قرار هست شبیه سازی کنیم یکی از مقالات ژورنالی الزویر هست که درباره استراتژی کنترلی یک سیستم قدرت را که با استفاده از ادوات فکت و کنترل پیشین یک فرم بادی یا مزرعه بادی را کنترل میکند و با استفاده از این ادوات فکت و کنترل پیشبین استیبیلیتی یا پایداری شبکه را برای ما به حداکثر خودش میرساند.
در این مقاله همانطور که اشاره شده است با استفاده از یک SSSC و یک ذخیره ساز انرژی که یک ابر خازن هست میزان اوسیلیشن شبکه یا میزان ناپایداری شبکه ما را به حداقل میرساند. که در ادامه درباره جزییات بیشتر این روش کنترلر و DFIG ای که استفاده شده است و کلاً سیستمی که پیاده شده است توضیح خواهیم داد.
توان اکتیو و ری اکتیو
با استفاده از کامورتری که سمت روتور هست و کامورتری که ما درسمت روتورقرار میدهیم میتوانیم کنترل توان اکتیو و ری اکتیو رو در این سیستم داشته باشیم که حالا کنترل توان ری اکتیو و اکتیو ما با استفاده از توابع چند جمله ای و چند جمله ای لژانر هست که در ادامه درباره آن صحبت خواهیم کرد.
شماتیک سیستم
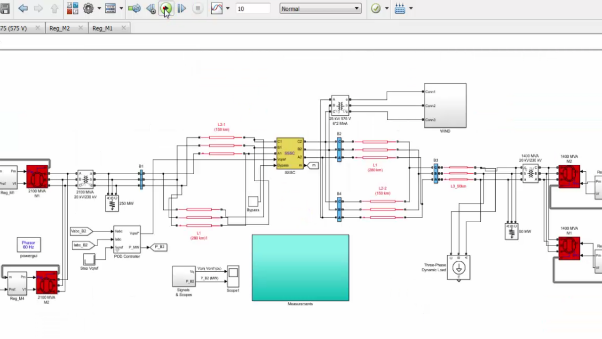
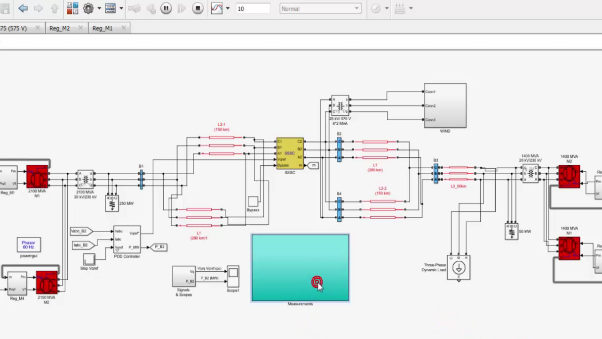
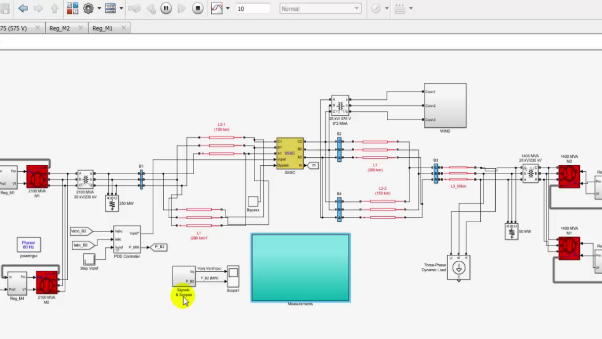
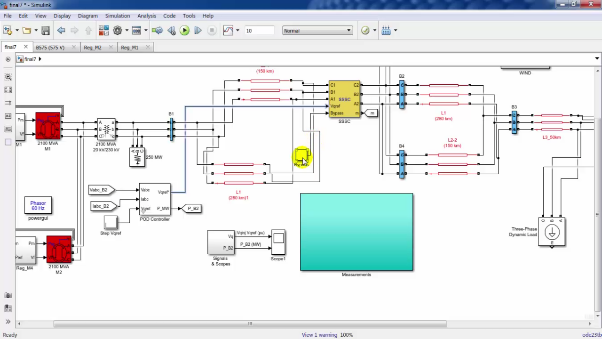
اگر بخواهیم شماتیک داده شده در مقاله را توضیح بدهیم با استفاده از 20 عدد توربین بادی که اینجا آورده شده است که هر کدام از آنها 5 مگا وات را برای ما تأمین میکنند و یک سیستم ac/dc/ac که روی هر توربین نصب است به میزان 690 ولت را هر کدام از این توربینها تأمین میکند و با استفاده از ترانز سه فاز که در مدار قرار دارد و ما همه اینها را یکجا شبیه سازی کردهایم به جهت اینکه زمان شبیه سازی ما با اینکه در مود فازوری هست باز هم زمان شبیه سازی خیلی طول میکشد
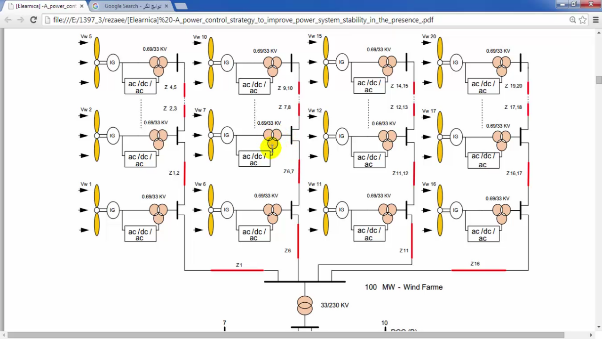
و مجبور شدیم همه توربینها را جمعاً یکصد مگاوات در نظر بگیریم ولی ولتاژ و سایر پارامترها را دقیقاً برابر مقاله قرار دادیم که یک ترانس سه فاز هست که با استفاده از این ترانس میزان 690 ولت را به 33 کیلو تبدیل میکند و بعد از آن 33 کیلو ولت را به 230 کیلو ولت تبدیل میکند.
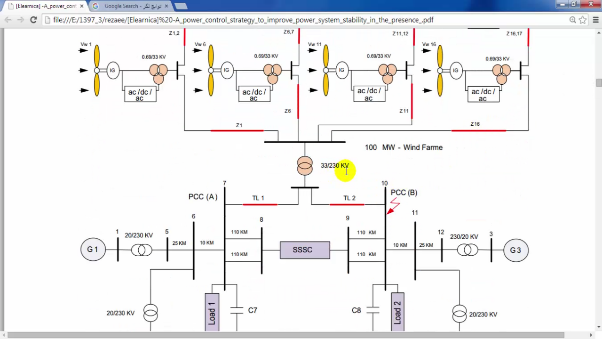
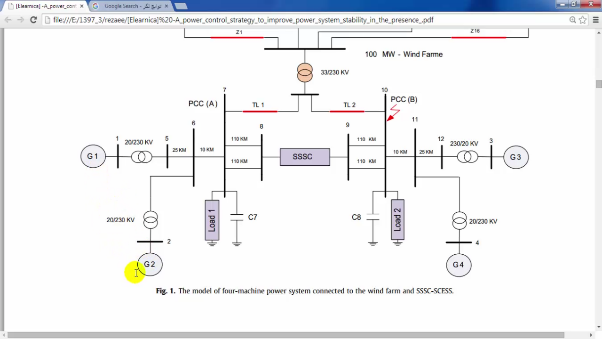
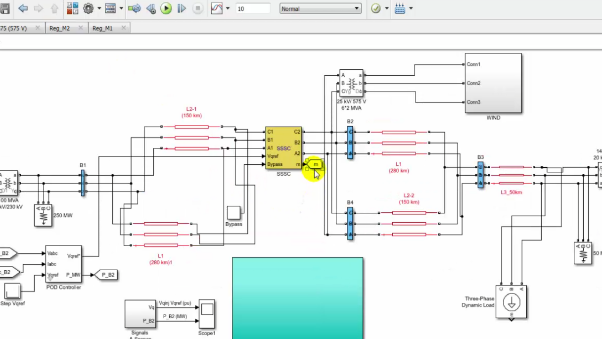
در سمت چپ دو ژنراتور قرار دارد که هر کدام از آنها 20 کیلو ولت هستند و در نهایت به 230 کیلو ولت تبدیل میشوند. SSSC ما در قسمت وسط قرار دارد که با چند خط به بازها وصل شده است. سمت راست هم دقیقاً مشابه و قرینه سمت چپ است و دقیقاً دو طرف شبکه ما شبیه هم هست و 2 ابرخازن هست که 2 تا بار محلی به آنها وصل است که در ادامه شبیه سازی به آنها خواهیم پرداخت.
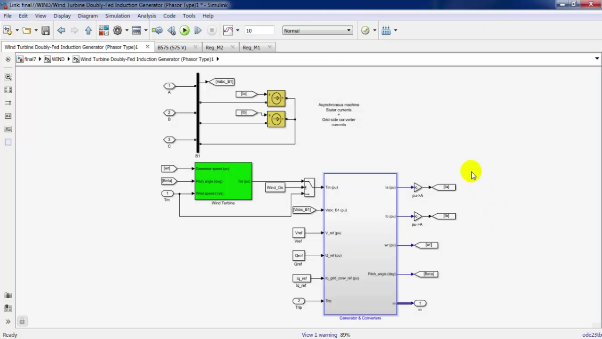
در قسمت پروک دیاگرام DFIG که در شکل میبینید یک کامورتری وجود دارد که سمت Grid یا شبکه ما هست که فرامین کنترلی به اینها داده میشود و یک جریان و میزان چرخش توربین به صورت رفرنس به این وارد میشود و از سمت مشخص شده میزان توان ری اکتیو ما هست که به این قسمت به صورت رفرنس و اندازه گیری شده وارد میشود و همه این اعمال منجر به ایجاد یک پالس کنترلی برای ما میشود که در DFIG ما استفاده میشود و تمامی 20 عدد DFIG که ما داریم همگی دارای این سیستم هستند و به صورت مشابه همگی کنترل میشوند.
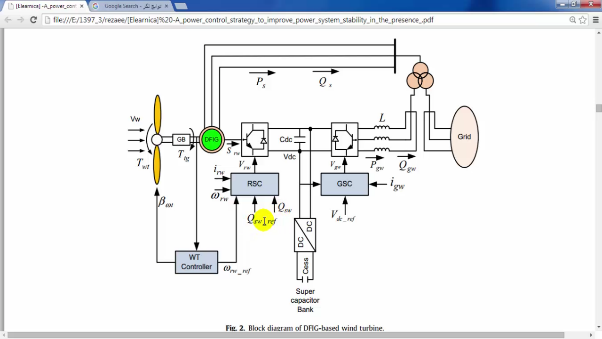
یک سری اندوکتانس در خروجی هست که در سمت راست شکل بالا قرار دارد و یک controller مکانیکی هم در قسمت پایین سمت چپ شکل قرار دارد در ادامه در مورد این DFIG و خود توربین بادی بیشتر توضیح خواهیم داد.
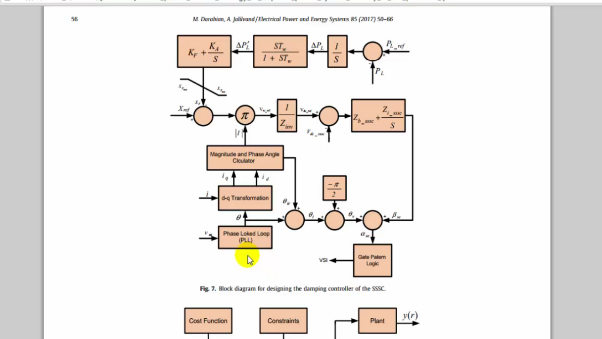
سیستم کنترلی
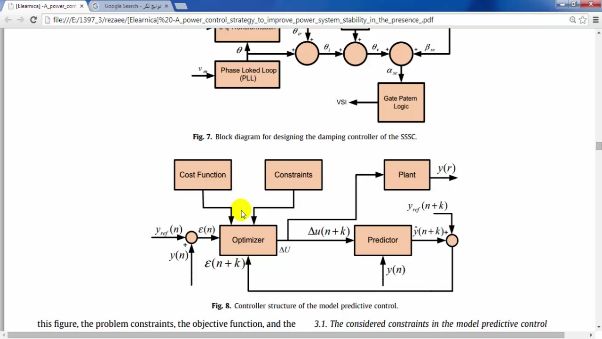
سیستم کنترلی که به صورت کنترل پیش بین قرار دارد در این قسمت توضیح داده است که با استفاده از Function هایی که مربوط به قیمت و غیره هست Optimiz را انجام میدهد و در نهایت پیش بینی را انجام میدهد که در ادامه درباره آنها صحبت خواهیم کرد و همچنین درباره PLL و SSSC هم صحبت میکنیم.
توضیح دادن این مقاله به زمان بسیار زیادی نیاز دارد. دوباره به مبحث شبیه سازی میرویم و در صورت نیاز برمی گردیم.
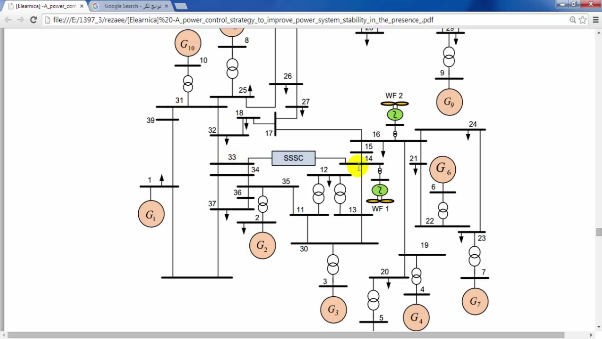
شکل زیر هم یک شبکه واقعی است پیاده سازی ها در آن انجام شده است و در بین بأس 33 و 14 یک SSSC قرار داده است و یکسری پیش بینیها را برای eg در بأس 14 و با 16 دارد که در ادامه در مورد آن توضیح خواهیم داد.
شبیه سازی سیستم
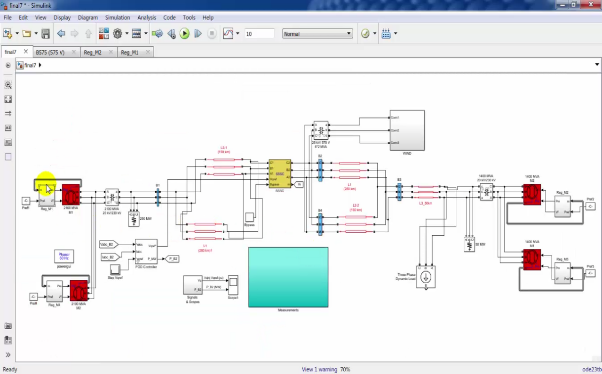
شبیه سازی ما از دو قسمت و این و سیستم ما تشکیل شده است که خود همین سیستم از قسمتهای مختلف تشکیل شده است که سعی میکنیم تمام آن را توضیح بدهیم تا نکته خاصی از آن باقی نماند و بعداً مشکلی پیش نیاید.
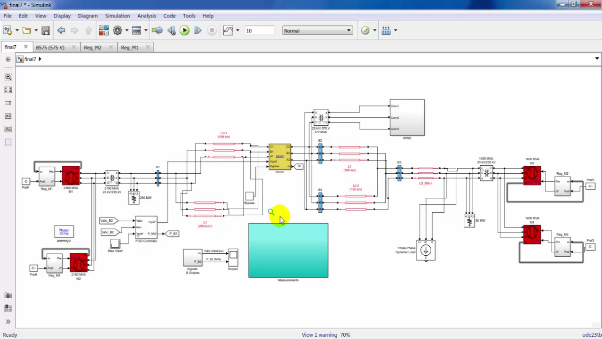
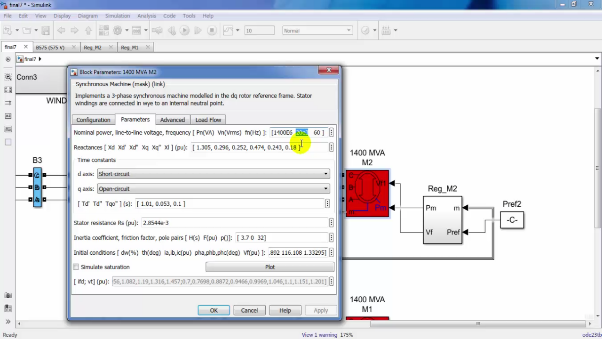
سیستم اصلی ما از چهار ژنراتور تشکیل شده است که این ژنراتورها هر کدام دارای سابسیستمی هستند که هر کدام از این سابسیستم ها برای میزان توان را کنترل میکند.
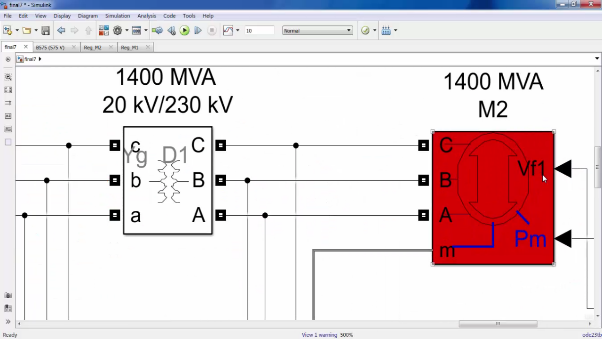
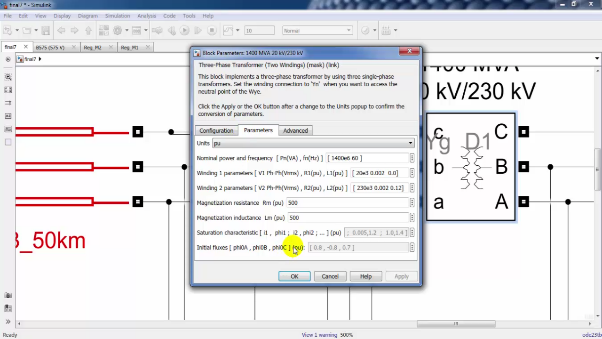
هر کدام از این چهار ژنراتور به یک ترانس وصل هست که این ترانس باید 20 کیلو ولت به 230 باشد و هر کدام از اینها هم بر اساس یک توان نامینال و و یک ولتاژ نامینال و فرکانس 60 هرتز تشکیل شدهاند که ولتاژ نامینال RMS و مؤثر ما برابر 20 کیلو ولت قرار داده شده است که در شکل زیر بر حسب فارمتر مشاهده میکنید.
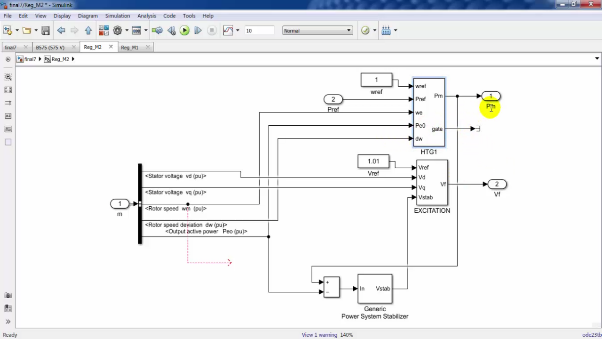
سابسیستمی که برای ما میزان توان را محاسبه میکند از یک ولتاژ رفرنس روی vq و روی Vstab تشکیل شده است که یک Stabilizer میزان پایداری ما را بررسی میکند که در ادامه آن را توضیح خواهیم داد.
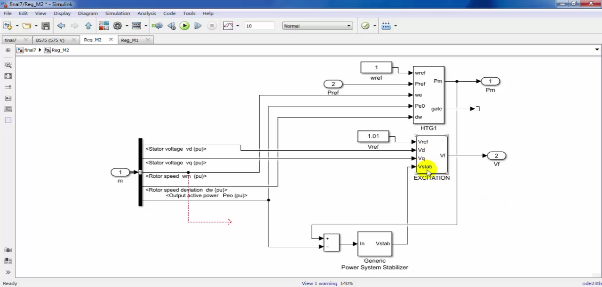
این تغذیه ما اگر سابسیتم آن را مشاهده کنیم خودش از یکسری کنترلاکت ها مدل شده است که vd و vq را در همدیگر ضرب میکند و آن را به یک فانکشن میدهد که رادیکال vd به توان 2 را با vq به توان 2 جمع میکند و با استفاده از رادیکال آنها آن را وارد low pass filter میکند vref وارد این سیستم میشود و از این مقدار کم میشود و در نهایت با استفاده از یک کنترلر piv که کیس اول مقاله ما هست یک میزان آن به صورت یک گیت فید بکی دمک میشود و وارد vf ما میشود که vf خودش وارد سیستم ما میشود.


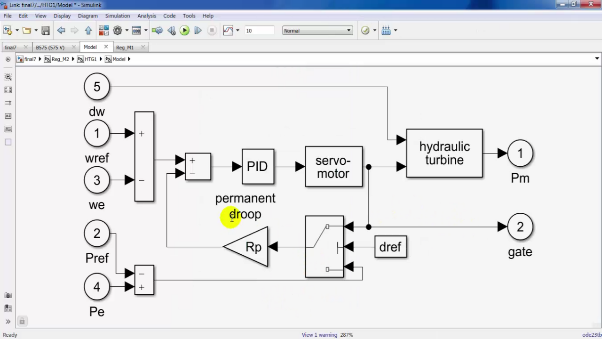
یک pm توسط htg ساخته میشود که دقیقاً مشابه همین سیستم است که اگر آن را هم بررسی کنیم خواهید دید که wref و we با همدیگر از فیدبکی که گین Rp ضرب شده کم میشوند و وارد یک PID و در نهایت servo-motorld میشوند و Pm ما را میسازند که خود همین servo هم از یک فانکشن تشکیل شده است که یک بلوک سجوریشن می اید و این سربو را در یک محدوده ای نگه میدارد که vgmax و vgmin هست و آن را به پوزیشن تبدیل میکند و در نهایت وارد توربین ما میشود که خود توربین ما میشود.

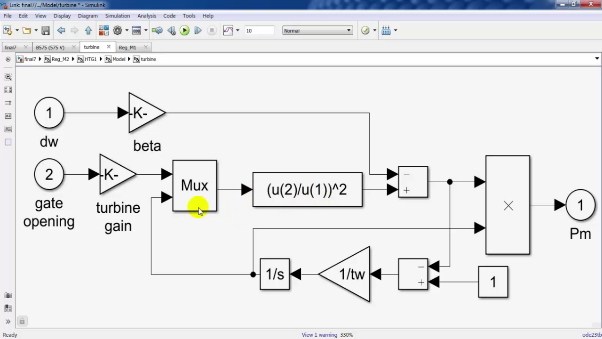
توربین
توربین هم از دو قسمت dw و gate opening تشکیل شده است و بعد از یک سری محاسبات که محاسبات مکانیکی موتور ما هستند وارد pm ما میشوند و به صورت pm از این قسمت خروج پیدا میکنند و وارد خود ژنراتور میشوند.
بعد از ژنراتورها یک ترانس وجود دارد که خود ترانس هم به صورت ستاره و مثلث سیم بندی شده است و میزان توانش 1400 انتها در نظر گرفته شده است و نرخ تبدیلی هم که برایش در نظر گرفتهایم 20 ولت به 230 کیلو ولت هست که در قسمت زیر میبینید.
بعد از آن یک سر خطوط هست که در خود مقاله هم به آن اشاره شده است و لاین 1 و لاین های ما را تشکیل دادهاند. در سمت راست تصویر از شبیه سازی که آن را میبینید طبق مقاله از دو ژنراتو استفاده کردهایم و یک Controller که ما قرار دادهایم و در تصویر مشخص است
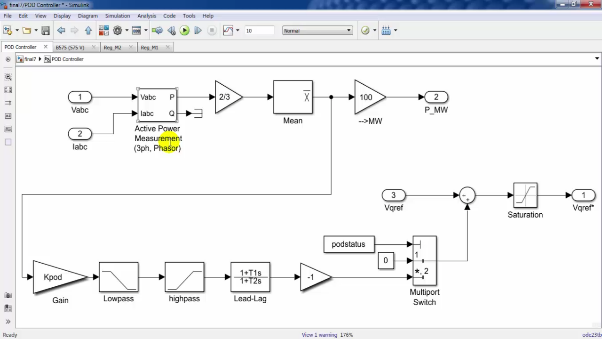
با استفاده از Vabc که در قسمت راست تصویر زیر هست P و Q را اندازه گیری میکند و در 3/2 ضرب میکند عدد بدست آمده را با استفاده از یک گین که هم lowpass هست و هم highpass که یک فیلتر میانگذر هست میآید و میانه این سیگنال را محاسبه میکند با استفاده از یک lead-lag آن را وارد سیستم ما میکند که حالا با استفاده از یک بلوک saturation محدود میشود به به دو ولتاژ که از یه حدی بالاتر یا پایین تر نمیرود و Vqreflh در اینجا مشخص میشود که خود این وارد سیستم sssc ما میشود که در ادامه درباره آن صحبت خواهیم کرد.
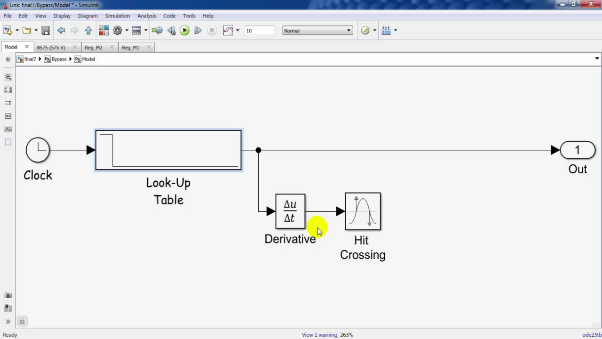
سیستم Bypass
یک سیستم Bypass داریم که در شکل زیر نشان داده شده است و برای ورودی sssc ما که خود آن از یک Look-Up Table تشکیل شده است که از ورودی یک Clock ووارد یک Look-Up Table میشود و سیستم بای پس ما را تشکیل میدهد که حال این Look-Up Table به دلخواه خود ما هر چیزی میتواند تشکیل بدهد.
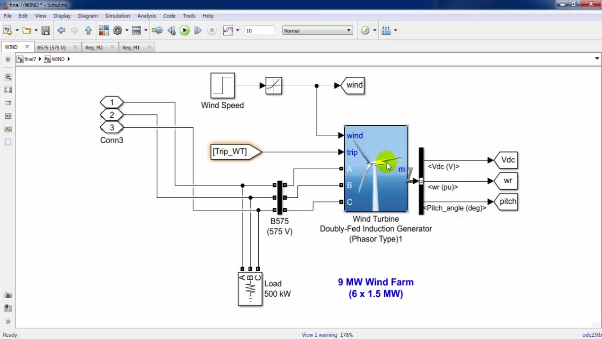
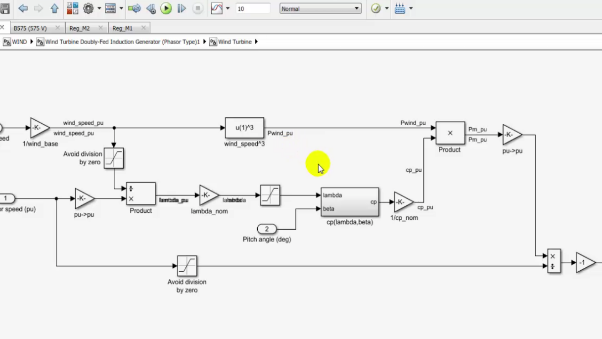
قسمت wind
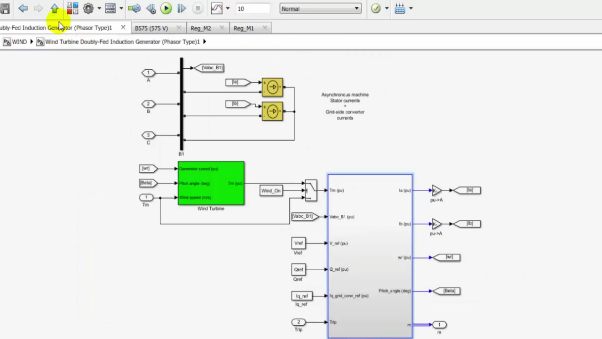
قسمت بعدی قسمت wind ما هست که از یک توربین بادی تشکیل شده است این توربین بادی که داریم خودش از اجزای مختلفی تشکیل شده است که یکسری کنترلر ها هستند که خودش از یک کنترلر سمت روتور ویک کنترلر سمت شبکه تشکیل شده است.
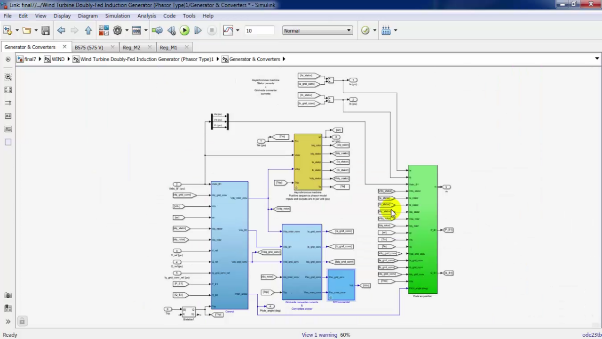
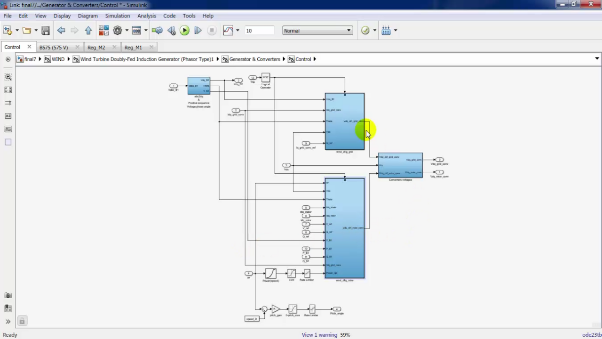
کنترلر سمت روتور ما خودش از یک Idq references و یک Current regulator تشکیل شده است. 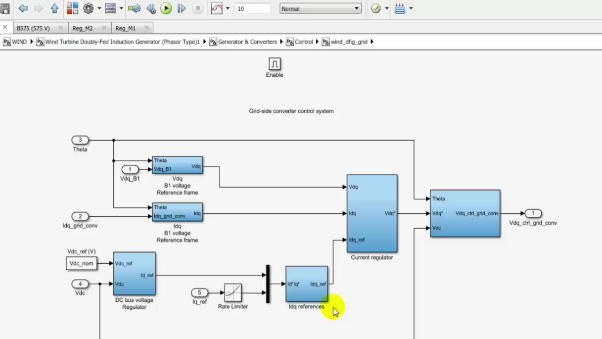
همانطور که در شکل زیر میبینید Current regulator Idq-ref و Idq را در هم ضرب میکند و وارد یک PID میکند. 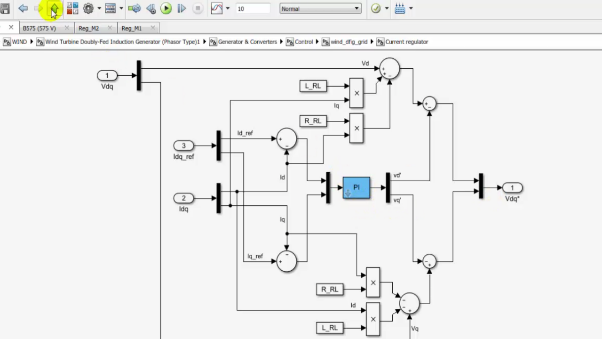
خود اینها وارد یک قسمت Cartesian to Pokar1 میشوند که با استفاده از Vdc آن را در یک ایرگین ضرب میکند و در نهایت Vd کنترل ما را خارج میکند.
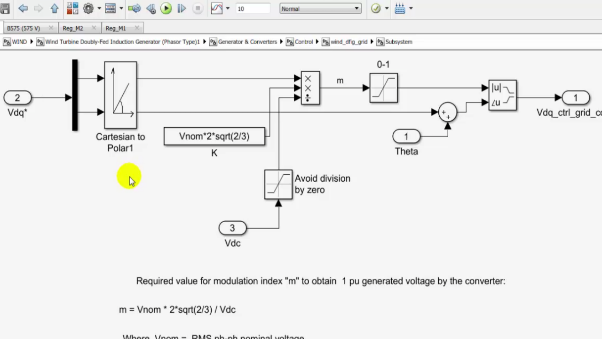
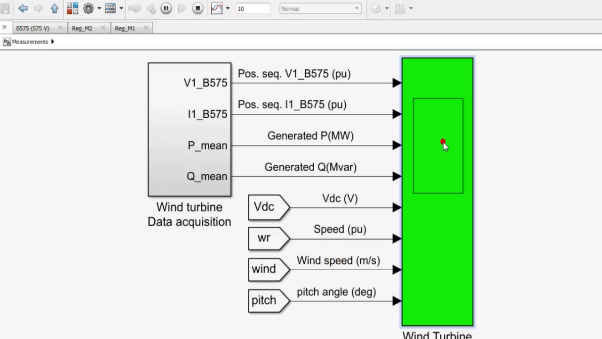
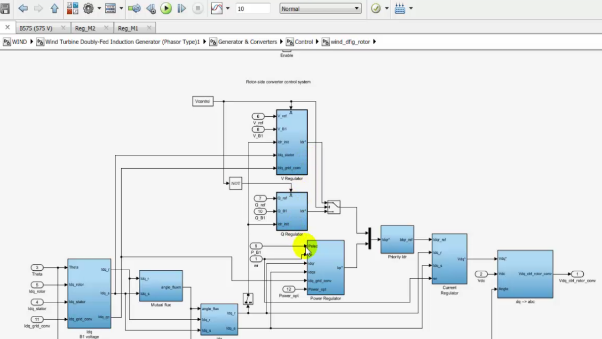
و بأس dc با استفاده از یک PI کنترلر کنترل میشود همچنین یک کنترلر سمت شبکه داریم که با استفاده از یک V Regulator و Q Regulator با Regulator توان تلفیق میشود و در نهایت دیتاها از هم جداسازی میشوند و به عنوان خروجی میجرمنت ما اندازه گیری میشوند.
یک قسمت توربین بادی در این قسمت داریم که با استفاده از یک wind-speed وارد سیستم ما میشود و بعد از بعنوان خروجی 1 گشت آوری wind را ایجاد میکند.
قسمت SSSC
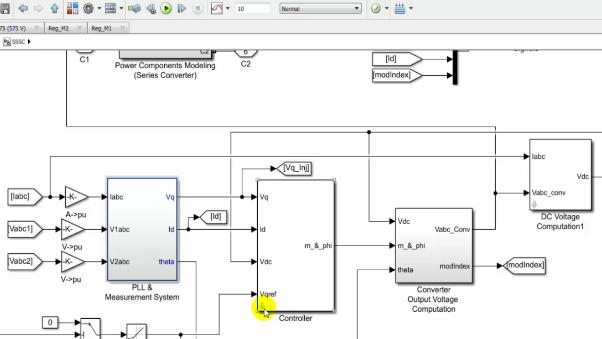
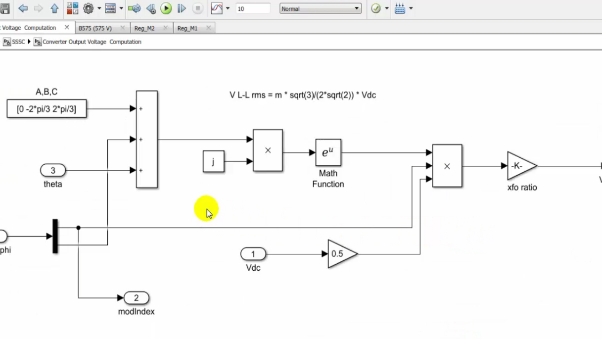
در نهایت SSSC هست که اگر بخواهیم آن را تشریح کنیم خودش از یک قسمتهای مختلفی تشکیل شده است که یک قسمت آن Converter هست که برای ما ولتاژلاین به لاین را برای ما ایجاد می کندو با استفاده از یک PLL که در خود این شبیه سازی ما درباره آن توضیح داده شده Phase Loked Loop برای ما PLL را تشکیل میدهد.
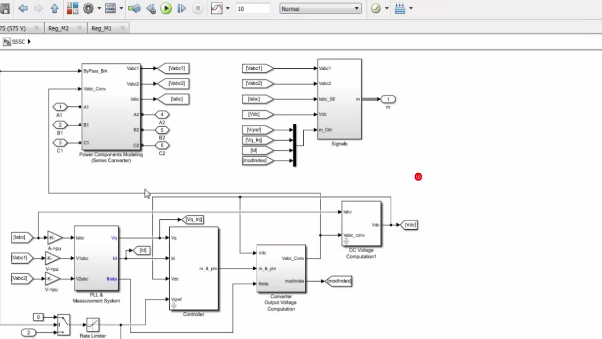

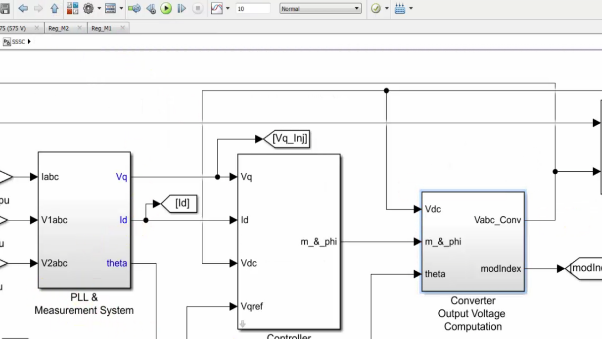
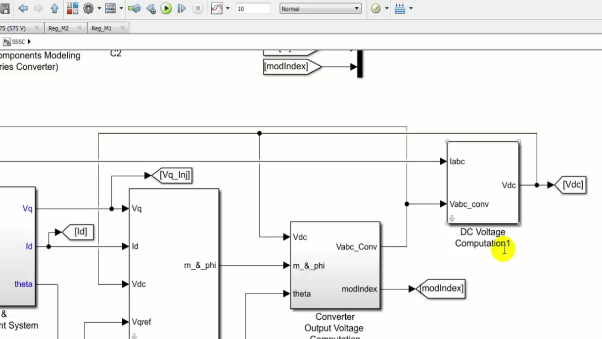
اندازه گیری PLL
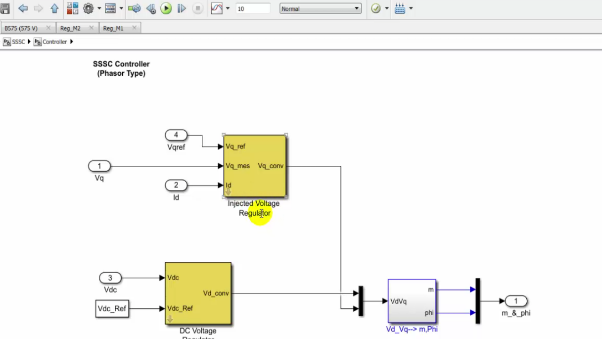
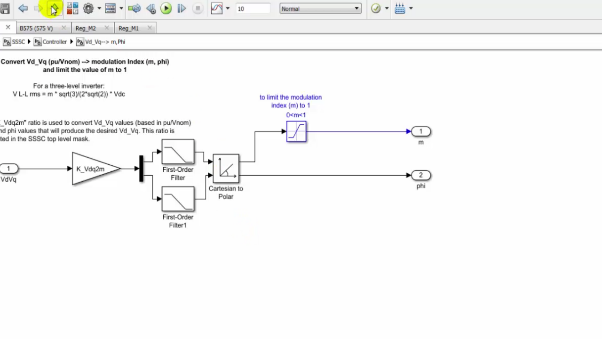
بعد ازاینکه PLL وارد شد و سیستم ما را اندازه گیری کرد در خروجی وارد یک کنترلر میشود که کنترلر ما با استفاده از اندازه گیریهایی که روی vq و Id را انجام میدهد آنها را وارد یک گین میکند و بعد سجوریشن vq-conv تشکیل میدهد و خود این را با استفاده از کنترلر پیش بین وارد سیستم پولور ما میکند و در نهایت خودش وارد DC Voltage میشود و DC Voltage که قرار است اندازه گیری بشود به عنوان خروجی به ما میدهد و در قسمت میجرمنت آن را منعکس میکند.
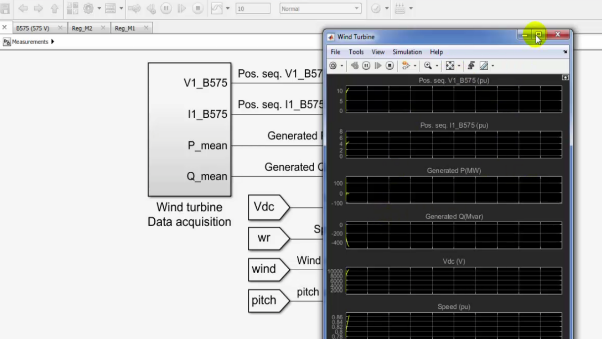
راند شبیه سازی
اگر بخواهیم شبیه سازی را راند کنیم (طبق تصاویر زیر) بعد از راند شدن خروجیها را در قسمت میجرمنت میتوانیم اندازه گیری و آنها را مشاهده کنیم، همه نمودارها شروع به رسم شدن میکنند و بعد از 10 ثانیه ما خروجی این شبیه سازی را خواهیم داشت و میتوانیم در قسمتهای مختلف سیگنالهای مختلف را اندازه گیری کنیم.