كوچكترين ربات دنيا
اين ربات كه اليس (Alice) اسمش هست به اندازه ي حبه قند طول و عرض و ارتفاعش 2 سانتي متره . اين ربات رو همكار ژيل براي پروژه دكتراش ساخت و چهار ماه پيش از تزش دفاع كرد.
نمونه رباتهاي كوچولو در چند دانشگاه ديگه از جمله ام آي تي هم ساخته شده ولي يا اندازه اونا به اين كوچكي نيست يا اينكه به اين اندازه خود مختار نيستند.
اليس دو تا چرخ داره و هر چرخ به يه موتور ساعت وصله ! اين موتورهاي يه نوع ساعت خيلي دقيق سواچ هستند و كنترلشون با كنترل موتورهاي عادي فرق داره و خيلي پيچيده تره .
موتورهاي ساعت به صورت تجاري موجود نيستند و شركت سواچ هم علاقه اي به كار رباتيكي نداره به همين دليل اين ربات فقط جنبه تحقيقاتي داره و نتونسته به صورت محصول تجاري به بازار بياد. ما موتور ساعت رو
مي بريم و دو تكه مي گذيم و فقط از يه قسمتش كه شامل سيم پيچ و چرخ دنده هاي خيلي ريزه استفاده مي كنيم . چرخ سوم ربات كه فقط يه نقطه اتكا براي پاي دار نگهداشتن ربات هست ته يه سوزن ته گرده كه به چارچوب پلاستيكي ربات فرو شده ! و در حقيقت چرخ نيست فقط رو سطح صاف سر مي خوره .
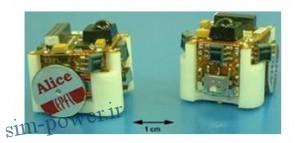
اين ربات چهار تا سنسور مادون قرمز داره و با اونا اشيا اطراف رو تا فاصله سه ، چهار سانتي متري تشخيص ميده ، يه سنسور جلو ربات نصب شده يكي عقب و دوتاي ديگه هم قسمت جلو سمت راست و چپ يه ماژول دريافت سيگنال از كنترل تلويزيون هم داره ( اون نيم كره سياه رنگ ) كه مي تونين با استفاده از كنترل هاي موجود در بازار به اون دستور بدين .
چارچوبي كه اجزاء ربات روش سوار شدن يه فريم پلاستيكيه براي محكم نگهداشتن اجزاء به اضافه خود PCB يعني به خاطر كوچيك كردن ربات خود PCB رو نازك گرفتن كه بشه به صورت مكعب درش آورد. باتري قابل شارژ ربات تو اين مكعب توخالي جا ميگيره و بزرگترين قسمت رباته . با دقتي كه در انتخاب قطعات الكترونيكي و مكانيكي صورت گرفته تا مصرف ناچيزي داشته باشند ، باتري شارژ شده از دو ساعت تا ده ساعت انرژي لازم رو براي حركت ربات تامين ميكنه . يه بورد شارژ و برنامه ريزي هم ساخته شده براش كه با اتصال به پورت سريال كامپيوتر مي شه برنامه توش آپلود كرد و در صورت لزوم برنامه رو ديباگ كرد.

يه ميكروپروسسور PIC16F877 هم داره كه هشت كيلو بايت فضاي برنامه ، 368 بايت رجيستر و 256 بايت EEPROM داره . حالا تو اين هشت كيلو بايت هم بايد كنترل موتور و خوندن سنسورها و ارتباط از راه دور جا بشه و هم رفتارهاي ديگه . سرعت ربات يه مگاهرتزه و امكان اضافه كردن سنسورهاي ديگه بالاي ربات وجود داره . تا حالا تجهيزاتي مثل بورد ارتباط راديويبي ، ماژول ارتباطي ايردا ، اوربين خطي و دوربين رنگي ( از
همون هايي كه تو موبايل ها استفاده مي شه ) براش ساخته شده .
از اين ربات حدوداٌ دويست تا ساخته شده كه حدود 10 تاش تو دانشگاه Caltech براي مطالعه رفتار جمعي استفاده مي شده . حدود 20 تاييش دست بيولوژيست هاي بلژيكي و فرانسويه براي مطالعه رفتار سوسكها !
حدود ده تاي ديگه دست بيولوژيست هاي سوئيسيه براي مطالعه رفتار مورچه ها ، بيست تاي ديگه دست دانشجوهاي فوق ليسانسه براي پروژه هاي ترمشون . يه چند تائيش هم روي اينترنته !!! ميتونين برين و ربات رو از راه دور كنترل كنين. يه 40-30 تاش كه خراب شده و مشكل دارن . ميمونه 90-80 تاش كه من براي پروژه دكترام استفاده مي كنم .
من زياد با سخت افزار اون درگير نيستم و كار من بيشتر روي توليد رفتار ، بخصوص رفتار جمعي براي ربات هاست .