اسيلاتور
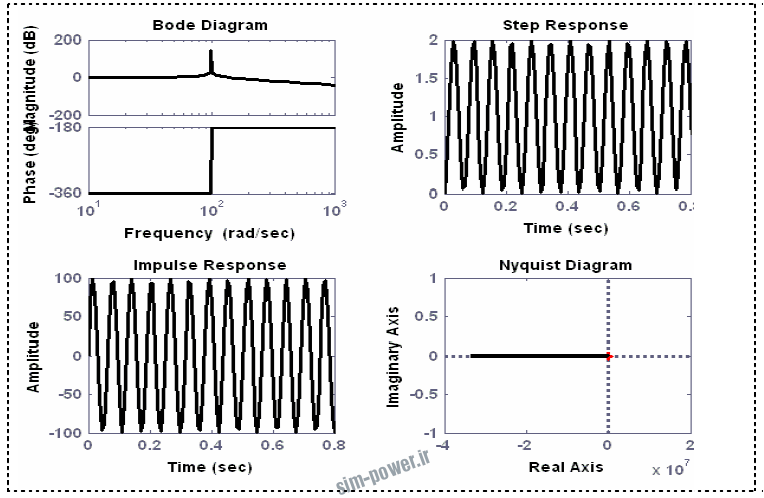
تابع تبديل زمان پيوسته مدار نوساني شكل را محاسبه كرده و پديد آوريد. ترسيم ()bode ، دياگرام نايكوييست، واكنش پله اي و واكنش ايمپالسي آنرا نمايش دهيد. تابع تبديل مثال فوق را به فرم فضاي حالت درآوريد.

% oscil.m
B = [10000];
A = [1 0 10000];
H = tf(B,A);
bode(H),step(H),impulse(H),nyquist(H)
[A,B,C,D] = tf2ss(num,den)
>> oscil
A = -1 B = 1 C = 1 D = 0
دستور rlocus براي رسم مكان هندسي ريشه ها
اين دستور براي بررسي تغييرات ضريب بازخور feedback gains بر روي مكان قطبهاي سيستمهاي حلقه بسته closed-loop مانند سيستم نمونه زير كاربرد دارد. مثال:

سيستم فيدبك منفي با دستور ()feedback
دستور ()feedback مدل LTI را براي يك سيستم بازخور منفي به دست ميدهد. مثال: شكل مدل LTI يك سيستم كنترل سرعت را نشان ميدهد.
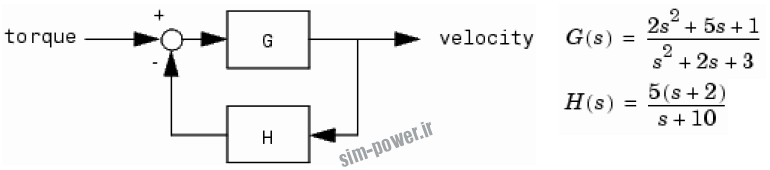
G = tf([2 5 1],[1 2 3]);
H = zpk(-2,-10,5);
Cloop = feedback(G,H)
Zero/pole/gain:
0.18182 (s+10) (s+2.281) (s+0.2192)
———————————–
(s+3.419) (s^2 + 1.763s + 1.064)
نویسنده: مصطفی همت آبادی
مقاله متلب,مطلب,متلب,مقاله برق,مقاله قدرت,مقاله مطلب,مقاله سیمولینک,دانلود متلب,دانلود مقاله متلب,مقالهmatlab ,آموزش متلب,مطلب,متلب,آموزش برق,آموزش قدرت,آموزش مطلب,آموزش سیمولینک,دانلود متلب,دانلود آموزش متلب,آموزشmatlab ,پروژه متلب,مطلب,متلب,پروژه برق,پروژه قدرت,پروژه مطلب,پروژه سیمولینک,دانلود متلب,دانلود پروژه متلب,پروژهmatlab ,






