
روش کنداکتانس افزایشی و کنترل فازی
روش کنداکتانس افزایشی
(INC)، برایناساسکارمیکندکه 12 روش پرکاربرد دیگر تکنیک کنداکتانس افزایشی
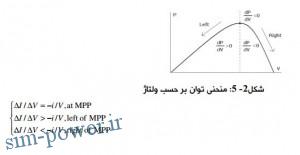
مطابق با منحنی شکل5 -2 شیبنمودار توانبرحسبولتاژ،درنقطه توان ماکزیممبرابر
صفراست [. 12،13 ] در این روش حاصلجمع رسانش لحظهای I/V و رسانش افزایشی
I/∆V∆ در MPP برابر صفر است، سمت راست MPP منفی و سمت چپ MPP مثبت
است. شکل4-2 الگوریتم روش کنداکتانس افزایشی را نشان میدهد. اگر تغییرات
جریان و ولتاژ صفر باشد در عین حال، نیازی به افزایش یا کاهش جریان مرجع نیست.
اگر تغییرات جریان زمانیکه تغییرات ولتاژ مثبت است نداشته باشیم، جریان مرجع باید
افزایش پیدا کند. بطور مشابه، اگر تغییرات جریان هنگامیکه تغییرات ولتاژ منفی است
صفر باشد، جریان مرجع باید کاهش پیدا کند. اگر I≠0∆ زمانیکه = V/∆I∆
V/I−نقطه کار PV در MPP است .
اگر V/∆I ≠ −V/I∆وV/∆I >−V/I∆ باشد، جریان مرجع باید کاهش یابد، بهرحال اگر
MPP تعقیب جهت در باید مرجع جریان ،باشد ∆V/∆I <−V/Iو∆V/∆I ≠ −V/I
افزایش یابد. در واقع به علت نویز و خطا، جبران وضعیت از V/∆I = −V/I∆ ممکن
است خیلی مشکل باشد. بنابراین، این وضعیت را میتوان با تقریب خوبی توسط
I/∆V + I/V| <ε∆|جبران کرد. که در آن εارزش مثبت کوچک است.
در مقالههای [ 13،15 ] از الگوریتم دو مرحلهای استفاده کرده به صورتی که ابتدا نقطه
کار را به MPP نزدیک میکند و سپس با روش INC به ردیابی دقیق MPP میپردازد.
در مقاله [16 ] با تقسیم مشخصه I-V به دو ناحیه توسط تابع خطی،نقطه کار را به
ناحیهای شامل همه MPP های ممکن تحت تغییر شرایط جوی آورده و در آخر با روش
INC به ردیابی MPP میپردازد. در مقالههای [17،18 ] از کنداکتانس لحظهای و
افزایشی جهت ایجاد سیگنال خطا، e،استفاده و سپس با بردن سیگنال خطا به سمت
PI به ردیابی MPP میپردازد. در مقاله [19 ] از مقاومت افزایشی 13 صفر توسط کنترلر
با اندازه پله متغیراستفاده و باعث افزایش سرعت و دقت پاسخ حالت ماندگار میشود.
روش کنترل منطق فازی
با توجه به پیشرفت ها در تکنولوژی میکروکنترلرها و DSP توجه به کاربردهای
MPPT در کنترل منطق فازی افزایش یافته است.[23،24 ] امتیاز کنترل کنندههای فازی
در کارکردن با ورودیهای غیردقیق و غیرخطی، عدم نیاز به مدل ریاضی دقیقو همگرایی
سریع و کمترین نوسان در MPP است. قابلیت سیستمهای فازی ردیابی online
ماکزیمم توان، مقاوم بودن در مقابل تغییرات تابش و دماو عدم نیاز به سنسورهای
خارجی برای اندازهگیری شدت تابش و دمااست .
کنترل منطق فازی مبتنی بر سه مرحله است :
1. فازی سازی 2. تعیین قوانین براساس جدول مراجعه3. غیر فازی سازی
مرحله فازی سازی تبدیل متغیر ورودی به متغیر زبانی مبتنی بر یک تابع عضویت
بطوریکه درشکل8 -2 نشان داده شده است. در این مورد پنج سطح فازی وجود دارد،
که اینها (PS (positive ،ZE (zero) ،NS(negative small)،NB (negative big
smallو ( PB (positive big هستند .
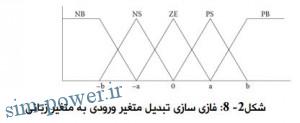
برای افزایش دقت، تعداد سطوح فازی بیشتری میتوان استفاده کرد. خطای E و
تغییرات خطا E∆ ورودیهای منطق فازی مبتنی بر کنترل کنندهMPPT هستند. E و
E∆ میتواند بر اساس ترجیحات کاربر محاسبه شود. از آنجایی که dP/dV در MPPT
نزدیک به یک بدست میآید، تقریبی ازمعادله(3 -2) میتوان استفاده کرد

بطورکلی، خروجی منطق فازی تغییر در D∆ از مبدل توان است. این تغییر در D∆
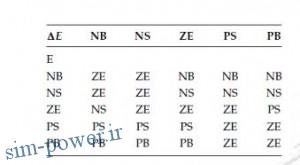
میتواند جستجو شود در یک جدول قواعد مانندجدول1 -2. بلافاطله بعد E و E∆
محاسبه شده و به متغیرهای زبانی تبدیل میشوند. از ترکیبات مختلف خطا E و
تغییرات آن E∆ میتوان به عنوان متغیر زبانی استفاده کرد و به D∆تخصیص داده
شود. برای یک مبدل بوست جدول1 -2 برای این مقصود میتواند استفاده شود. برای
مثال اگر نقطهکار از سمت راست MPP دور باشد و NB ،E باشد و ZE،∆E باشد پس
یک کاهش زیاد در D∆ نیاز است تا ولتاژ کاهش یابد. D∆ باید NB شود تا به MPP
برسد
جدول قواعد فازی
خروجی کنترل کننده فازی تبدیل یک متغیر زبانی به یک متغیر عددی است و یک تابع
عضویت بطوریکه درشکل8 -2 نشان داده شده برای سطح فازی سازی مورد استفاده
قرار میگیرد .
بوسیله فازی سازی، کنترل کننده یک سیگنال خروجی آنالوگ تولید میکند که میتواند
به سیگنال دیجیتال تبدیل شود و مبدل توان سیستم MPPT را کنترل کند .
تحت شرایط مختلف جوی، کنترل کننده منطق فازی عملکرد خوبی در کاربردهای
MPPT نشان میدهد. از سوی دیگر اثر کنترل کننده منطق فازی بستگی به دقت
محاسبه خطا و تنوع آن و قواعد توسعه یافته جدول پایه توسط کاربر را دارد. برای
بهرهوری بهتر، توابع و قواعد جدول پایه میتواند به طور مداوم به روز شده یا برای
دستیابی به عملکرد مطلوب شبیه به کنترل کننده منطق فازی تطبیقی تنظیم شود. به
این ترتیب همگرایی شدید به MPPT و حداقل نوسانات اطراف MPPT را میتوان
بدست آورد. علاوه بر این ردیابی عملکرد به نوع تابع عضویت بستگی دارد.






