ابتدا میتوانید یک ویدیو سه دقیقه ای را از این مطلب ببینید.
شبیه سازی ای که من تهیه کردم برای این مقاله از چند قسمت مختلف تشکیل شده است . قسمت اول شماتیک کلی کار است که در خود مقاله توضیح داده شده است .
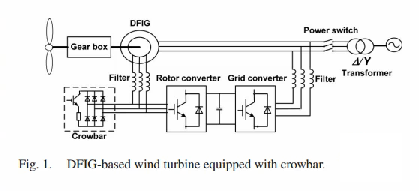
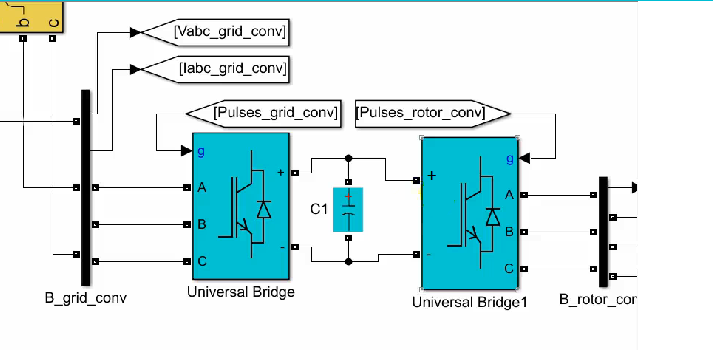
اول DFIG استفاده شده است که ما بجای این از یک VDFIGاستفاده کرده ایم. سیستم های Router converter و Grid Converter که سمت روتر دستگاه و سمت شبکه را از هم جدا می کند . دلیل وجود اینگونه سیستم ها همانگونه که توضیح داده شده این است که اینگونه سیستم ها به ما کمک می کنند تا با ثابت نگه داشتن لینک DC که در شبیه سازی ماهم به وضوح انجام شده بتوانیم کنترل دقیقی را روی کل این شبکه و فرکانس شبکه داشته باشیم که پارامتر بسیار مهمی است . بعد از آن یک سیستمی است که ما را با یک ترانسفورمر به شبکه اصلی مان متصل می کند که ما همه این ها را در شبیه سازی مان پیش بینی کرده ایم.
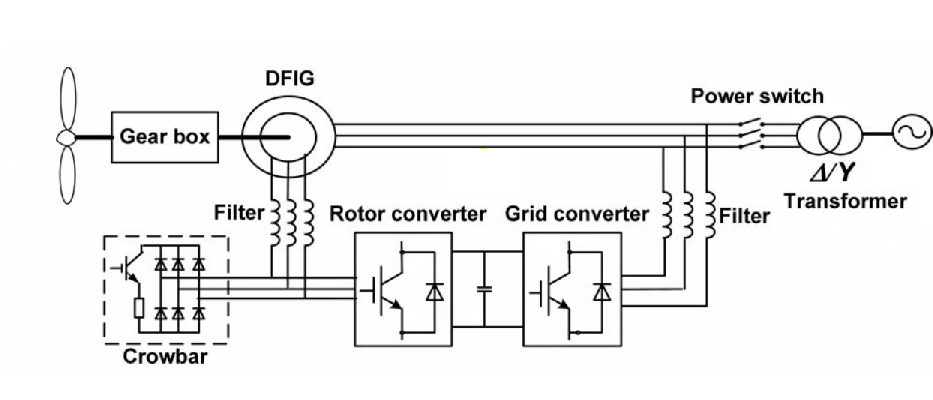
همانطور که می بینید یک DFIG در این مقاله بکار رفته است و ما بجای آن از BDFIG استفاده کرده ایم که خود از دو قسمت BW و TW تشکیل می شود ( قبلا توضیح داده شده است) ، قسمت Power و Control از هم تفکیک شده که در ادامه این بلوک به آن خواهیم پرداخت . بعد از آن BDFIG تنظیماتی با نام Bus قرار داده شده است که دو universal bridge converter سمت BDFIG ما است و converter که سمت شبکه ما است . بعد از آن ما bus شماره 11 را داریم که bus شماره دو ما می شود . و این با استفاده از یک transformer به شبکه ما متصل شده است که همانطور که می بینید طبق مقاله و چزییات بیشتری از مقاله که به آن خواهیم پرداخت .
اگر من بخواهم توضیحات بیشتری در مورد شماتیک simulation این شبیه سازی بگویم باید به خود مقاله base مراجعه کنم. مقاله خود تا حدی شماتیک ها را توضیح داده است.البته نکات مبهمی هنوز وجود دارد که با استفاده از رفرنس ها سایر موارد آن استخراج شده اند. همانطور که می بینید با همان کاری که ما انجام دادیم سیستم از قسمت های مختلفی تشکیل شده است :
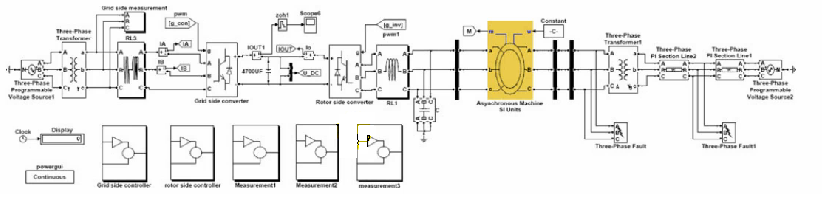
1_ asynchronies machine که سیستم در حالت SI آمده است و این قسمت را قرار داده است که ما نیز همان کار را انجام داده ایم و به لحاظ فیزیکی سیستم را به صورت asynchronies قرار داده ایم .
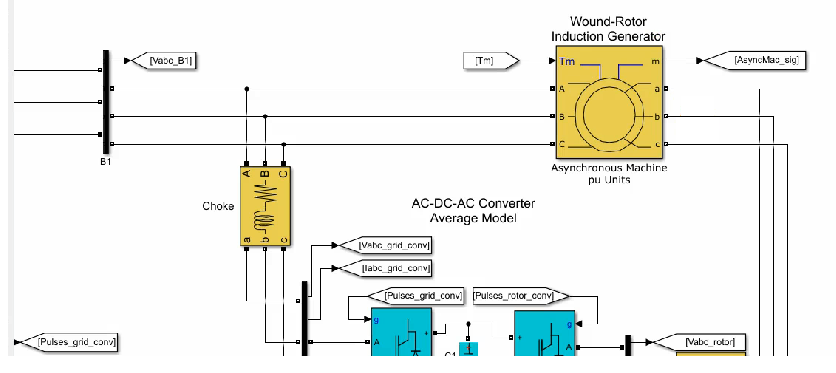
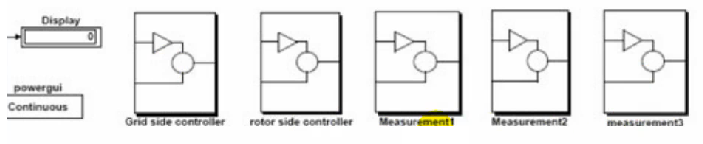
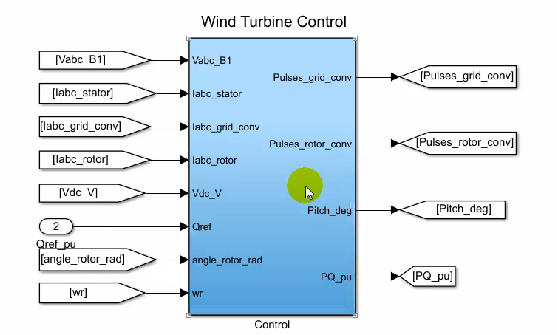
وبعد از آن یک ترانس قرار داده ایم و دو universal bridge را به صورت پشت به پشت در این قسمت قرار داده ایم که مشابه همان کاری است که خود مقاله انجام داده است . یک سری subsystem هایی را مقاله گذاشته است که 3-4 عدد آنها برای اندازه گیری است و controller های سمت aerator و controller سمت grade است که ما آنها را تصحیح کرده ایم به این جهت که می بایست ما از مدل bdfig استفاده می کردیم، مدلی که ما قبلا نوشته شده بود و ما از Matlab function آن استفاده کردیم. یک سری ورودی هایی دارد که به عنوان مثال VDI ,VQR, و ولتاژهای D,Q که خود مقاله نیز به آنها اشاره کرده است . ما باید سیستم abc مان را به d,q تبدیل کنیم که این کار انجام شده است. و به عنوان خروجیمان ، خروجی جریان ، خروجی d,q، خروجی گشتاور را داریم که اینها را بعنوان خروجی controller مان از آنها استفاده کردیم.
یکgrade side controller که من می خواهم بیشتر آن را شرح دهم .
قسمت grade side controller قسمتی است که چند چیز را به عنوان رفرنس از ما گرفته و سیستم کنترل را برای ما نجام داده است.
همانطور که می بینید IQ REFERENCE را به عنوان مثال صفر در نظر گرفته است یعنی میزان جریان q صفر است و به صورت پیش فرض می باشد در واقع q را از تابع goto استفاده کرده و از جای دیگری اورده است .
حالا اگر وارد این کنترلر بشوی ولتاژ dc ما به صورت نامینال آمده و از ولتاژ dc که در اول عرایض به آنها اشاره کردم از یکدیگر کم می شوند و به صورت پریونیت در می آیند و عدد پریونیت آن نیز 1/vdc(nominal) است که به صورت نامی می گوید چه ولتاژ dc را ما به سیستم می دهیم و خود قابل تغییر است.
دلیل اینکه اینها پارامتری در شبیه سازی ها گذاشته می شوند این است که بعدها انها را به راحتی تغییر داد و نیازی نباشد که ما آنها را با مراجعه به قسمت ورودی هر کدام به صورت دستی تغییر دهیم .
برای تغییر این ها می توانیم vdc(nominal) را در یک function بنویسیم وبعد از اجرای آنها به راحتی تمامی پارامترها می توانند تغییر کنند .بعد ازین مورد این گزینه را pi می کنیم و با یک iq این ها را با یکدیگرmux می کنیم و هر دو را تبدیل به یک سیگنال می کنیم.
بعد از آن idq را demux می کنیم و این ها را از یکدیگر کم می کنیم ( id-reference و iq- reference) و با مشابه های خودشان (دلیل اینکه در اینجا mux کردیم و سپس demux کردیم این است که با هم جنس خودش اینها را از یکدیگر کم کنیم و به لحاظ ظاهری این برای هر کسی قابل فهم باشد) بعد از آن این ها را از هم کم می کنیم و آنها را وارد pi می کنیم که vd و vq مان را تشکیل می دهد و وارد یک سری function می کنیم که اینها را v (nominal)*2*√2/√3 می کند که این فورمول آن بوده و باید این کار انجام شود
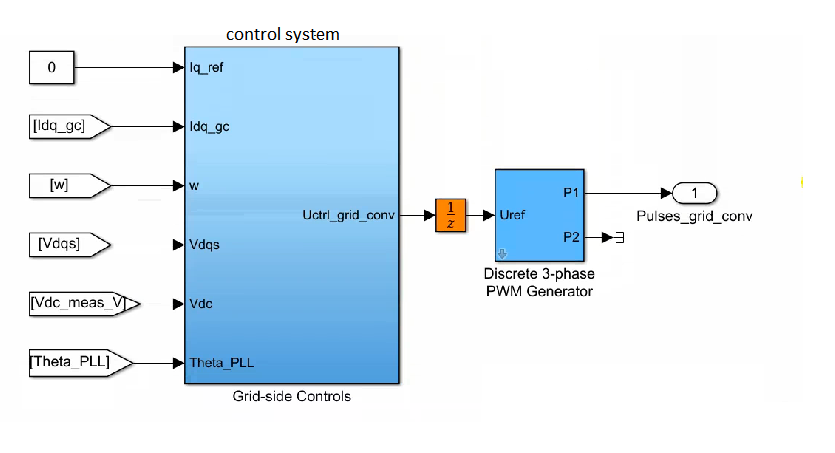
و vdc هم فقط برای اینکه اگر زمانی ولتاژ dc ما صفر شد avoid division by zeroدر اینجا می گذاریم که اگر چنانچه ولتاژdc ما صفر شد(چون می خواهیم آن را در مخرج بگذاریم) مانع از صفر شدن آن شود. بعد از آن وارد مرجله آخر می شویم که باید سیستم dq به abc ما تبدیل شود این کار را انجام می دهیم و در نهایت grade side converter control system ما که یک controller پیچیده، عمیق و در عین حال کاملا منطبق بر مبانی علمی است تشکیل می شود و سمت grade ما به این نحو کنترل می شود . سپس خروجی وارد یک pwm generator می شود که با استفاده از سه مرجعی که به آن داده می شود به عنوان رفرنس می آید و پالس ها را برای ما تشکیل می دهد . البته چون pwm controller برای سیستم 12 تایی آمده است و ساختارش برای آن انجام شده نیاز است که ما از یک leg on استفاده کنیم تا پالس ها به تعداد کافی برای ما ایجاد شوند.
بعد از آن می رسیم به router side controller system
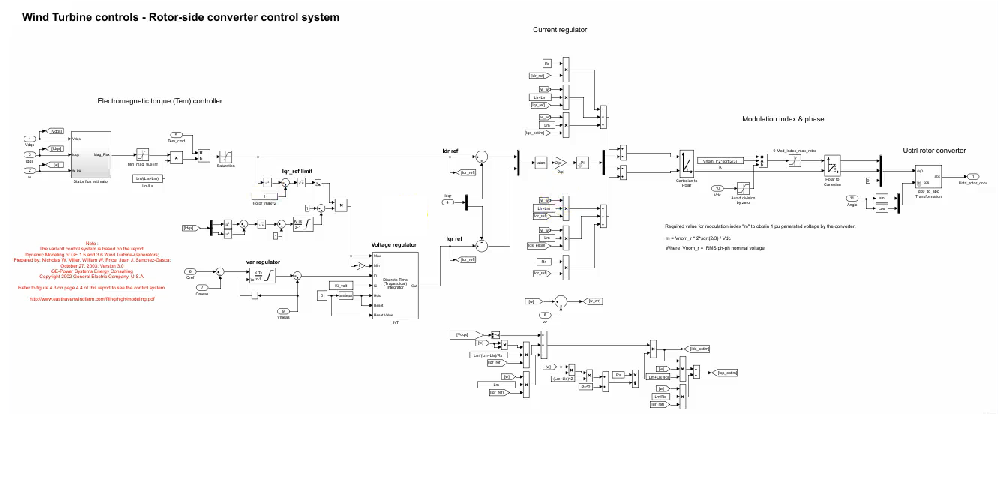
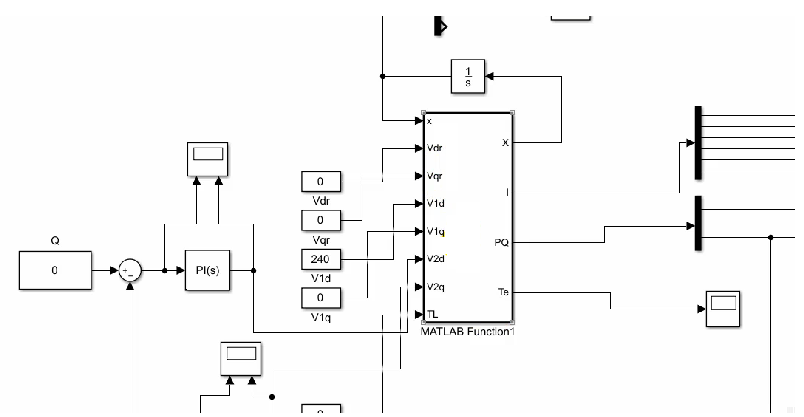
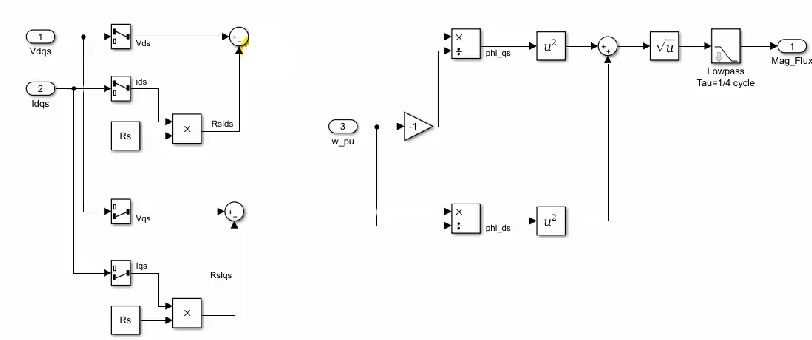
در مورد کنترلر سمت روتر پارامترهای دیگری دخیل است ، در مورد این هم کمی صحبت کنیم . اولین قسمتی که برای ما محسابات را در قسمت کنترلر سمت روتر انجام می دهد اسلاتور flux simulator است که میزان فلاکس سمت اسلاتور را تخمین می زند. برای این کار باید سه ورودی برای آن تعیین کنیم.
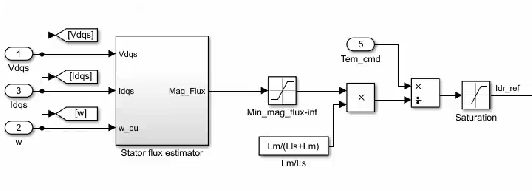
اول ولتاژ dqs ، جریانidqs سمت اسلاتور که در این قسمت مشاهده می کنید .و سوم میزان چرخش بر حسب per/unit وارد این estimator می شود و بعد از گذاشتن در فورمول تخمینی از میزان شار را دارد . بعد از آن میزان شار را محدود می کنند ( جاهایی که شار بهه اشباع می رود را در نظر نمی گیرند) و ناحیه خطی آن را برای محاسبات کنترلی در نظر می گیرند و میزان اندوکتانس سیم پیچ ها می کنند و با یک سری محاسبات id reference سمت روتر (idr ) را محاسبه می کنند و در نهایت از اینطرف نیز با یک ولتاژ regulation ما مواجه هستیم که برای ما ولتاژ را regulate می کند و iq reference را می دهد و در نهایت وارد ti می شود (عین connection های مربوط به سمت شبکه که توضیح داده شد).
و در نهایت اینها وارد فورمول v (nominal)*2*√2/√3 می شود . ولتاژ dc هم تقسیم بر آن می شود و در نهایت عین کنترلر سمت شبکه وارد یک abc می شود که ولتاژ های ما را به صورت abc می دهد و در این بلوک به صورت descript در آمد به صورت pwm می توانیم از آنها استفاده کنیم و هر کدام از اینها وارد این ورودی های ما می شود .
هر کدام پالس های سمت شبکه و سمت روتر را تشکیل می دهند و شبیه سازی ما به این نحو کامل می شود .
اگر بخواهم این قسمت را به عنوان قسمت اول جمع بندی کنم کنترلر ما همانطور که در مقاله یاد شده از دو قسمت converter سمت شبکه و converter سمت روتر که هر کدام قسمت های مختلفی دارد که فلاکسرا اندازه گیری(estimate)می کرد و هر کدام از اینها یک پالس را بوجود می اورند که هر کدام ازین پالس ها بر روی scbc یا ac converter که روی دو عدد universal ، از نوع back to back که با استفاده از یک خازن به یکدیگرمتصل شده اند شبیه سازی می شوند و در نهایت این است که اینها بعد از آسنکرون ما وارد یک ترنسفورمر شد جریان را از این سمت به شبکه مان و از سمت شبکه وارد ماینمان می کند.
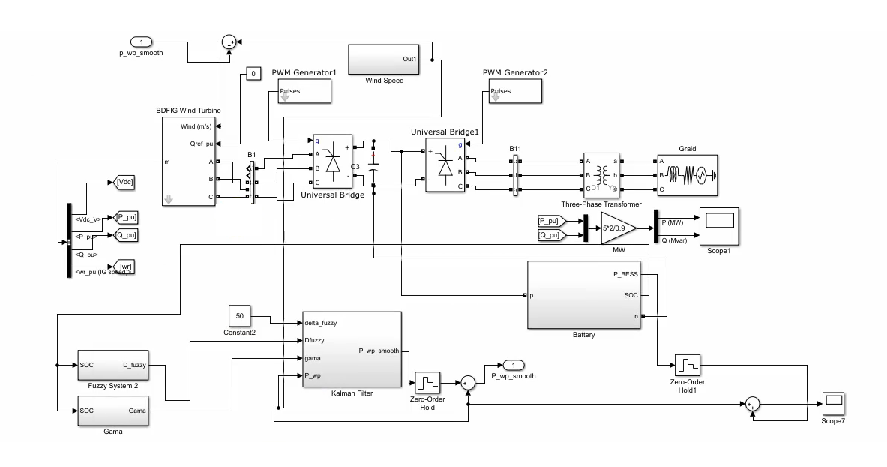
اگر بخواهم عرایضم را جمع بندی کنم سیستمی که من تهیه کردم یک pdfig است و بهبودی که من دادم در اینجا با استفاده از command filter نوع کنترلر هایمان را بهبود بخشیدم وبا استفاده از یک سیستم فازی بهینه سازی را روی قسمت کنترلر انجام دادم .
که ورودی های آن هر کدام از PWP دیتای فازی تشکیل می شود و در فیلم جداگانه ای در مورد آن توضیح خواهم داد و این شبیه سازی توضیحاتش به این شرح بود که خود شبیه سازی از دو قسمت اصلی تشکیل شده قسمت اول بعنوان کنترلر bdfig ما است که در این ناحیه قرار دارد . قسمت دیگر سیستم قدرت ما است از دو کانورتور back to back ودر نهایت measurement ها و bus های ما است که به شبکه متصل شده و شبیه سازی ما را تشکیل می دهد .