شبيهسازي يك كنترلر موتور به روش پيشبين و به همراه يك DTC
ابتدا میتوانید یک ویدیو از این مطلب را ببینید.
اين شبيهسازي كه كار كرديم شبيهسازي يك كنترلر موتور هست به روش پيشبين و به همراه يك DTC كه براي يك موتور آسنكرون يا يك موتور القايي به كار رفته است. در ابتدا يك روند كلي از يك شبيهسازي را توضيح ميدهيم و در نهايت در ادامه كار به جزء جزء اين شبيهسازي و يا اينكه چرا اين شبيهسازي به اين صورت انجام گرفته، ميپردازيم.
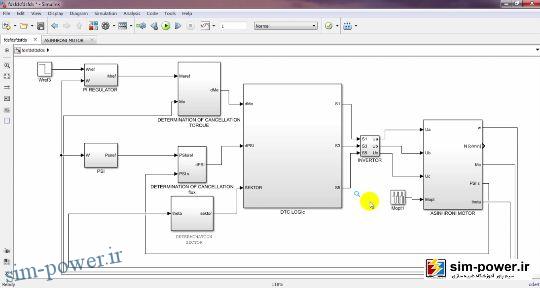
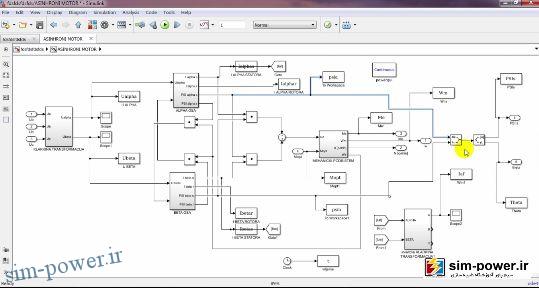
تصوير شماره (1)
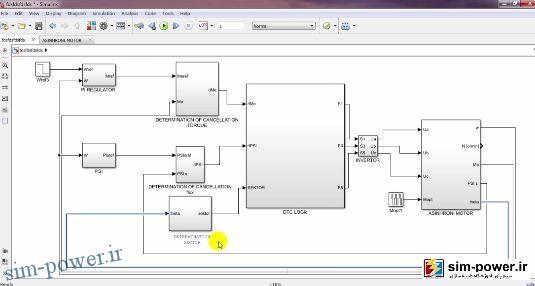
شبيه سازي از سه قسمت اصلي تشكيل شده است:
قسمت اول، قسمت شبيهسازي موتور القايي است كه در اين روش شبيهسازي موتور القايي، از موتور القايي آماده خود مطلب استفاده نكردهايم. به اين جهت كه موتور القايي كه در خود مطلب آمده و از آن استفاده كرده، نيازمند آن است كه به يكي از كتابخانههاي ديگر پاور متصل شويم و اين باعث ميشود كه زمان شبيهسازي ما بسيار بسيار افزايش پيدا كند و اصطلاحاً شبيهسازي ما را كرخت كند. به همين دليل نياز بود كه خودمان با استفاده از ماژورهايي كه غير آماده هست و ماژورهاي ابتدايي اين كار را انجام دهيم تا شبيهسازي دقيقتري را داشته باشيم، تا بعدها كه ميخواهيم سيستم DTC و سيستم كنترلر را متصل كنيم.
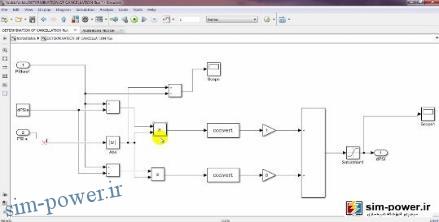
يك سيستم DTC در اين قسمت قرار دارد كه مابين آن يك Inverter است كه DTC را به آسنكرون وصل ميكند و در نهايت سيستم كنترلر هست كه از فيدبكهاي Omega ، MI PSI و تتا فيدبك ميگيرد و هر كدام از اينها را با استفاده از سيستم كنترلري كه داريم، به صورت يكپارچه و با استفاده از مدلهاي پيشبين كه داريم، پيشبيني ميكند و كنترل را انجام ميدهد.
تصوير شماره (2)
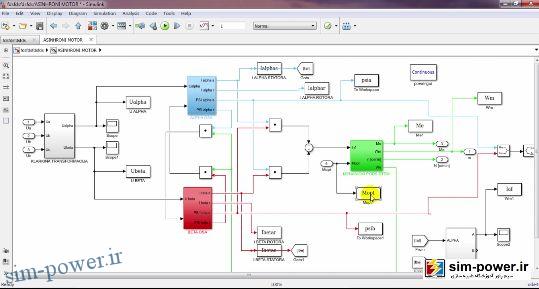
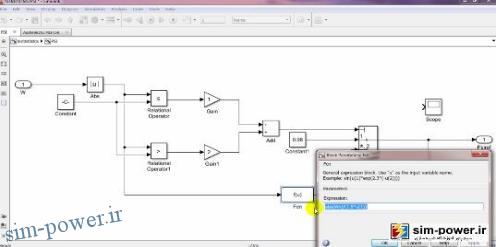
اگر دوباره بياييم و سيستم آسنكرون را باز كنيم، در سيستم آسنكرون ولتاژهايي وارد ميشود كه اين ولتاژهايي در ضريبهايي، ضرب ميشود كه با استفاده از اين ضريبي در كه در تصوير شماره 4 مشاهده ميكنيد، سيستم سهفاز به سيستم پارك ميآيد و به دو قسمت آلفا و بتا تقسيم ميشود.
تصوير شماره (3)
تصوير شماره (4)
بعد از اينكه اين عمل انجام گرفت و سيستم آلفا و بتا تفكيك شد، وارد يك سري معادلات مخصوص موتور القايي ميشود و بعد از آن به عنوان خروجي از قسمت PSI (در تصوير شماره 5 نشان داده شده است) و قسمت RIEL و بتا با همديگر ضرب ميشوند و خودش به دو قسمت فاز و اندازه تقسيم ميشود كه فازش به عنوان فاز SI و اندازهاش به عنوان تتا، خروجي ما است. (تصوير شماره 6)
تصوير شماره (5)
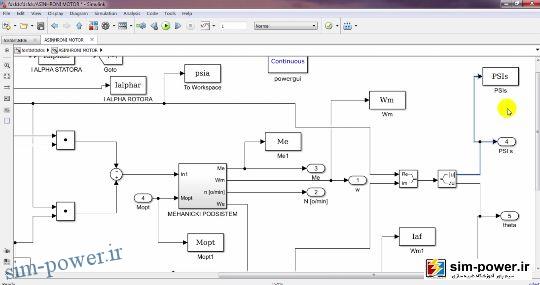
تصوير شماره (6)
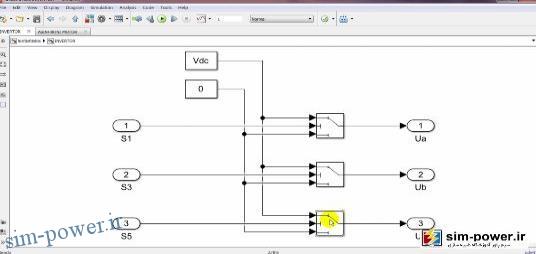
از طرفي دو جريان A و AB هم در اين قسمت اندازهگيري ميشود و با عكس تبديل پارك، دوباره تبديل به سيستم سه فاز ميشود. نياز بود مختصراً درباره اين شبيهسازي قسمت آسنكرون توضيح دهيم كه دليلش را هم ذكر كرديم، به اين جهت كه نميخواستيم از بلوكهاي آماده استفاده كنيم. براي اينكه بتوانيم DTC را به موتور آسنكرون متصل كنيم، و قسمتي از DTC ، تبديل به موتور آسنكرون شود، نياز بود كه خودمان اين كار را انجام دهيم. و Inverter كه به كار برديم Inverter اي است كه از سه تا سوئيچ تشكيل شده و به جهت اينكه ما نخواستيم از استفاده كنيم، از سه تا سوئيچي كه در خود كتابخانه Simolik است استفاده كرديم و با استفاده از ولتاژ DC كه در اين قسمت قرار دارد، آنها را سوئيچ ميكنيم و و به عنوان قسمت Inverter استفاده ميكنيم كه ميشود روي Inverter هم كنترلي داشت.
تصوير شماره (7)
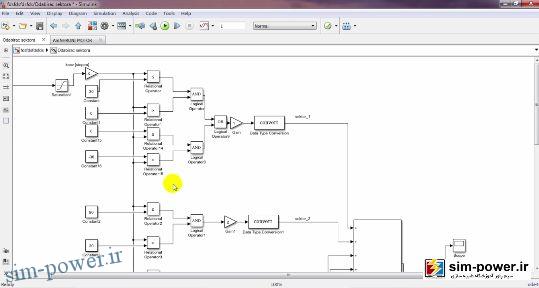
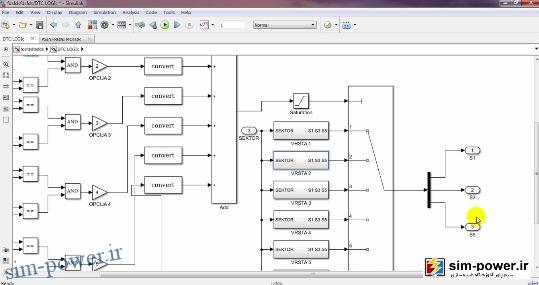
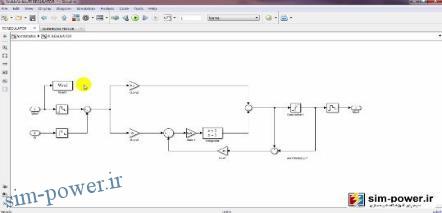
و اما قسمت DTC كه يكي از قسمتهاي اصلي شبيهسازي ما است، به اين نحو است كه DPSI و DME را مقايسه ميكند با عدد يك و خروجي آن را and ميكند و Convert ميكند و خروجيها را بعد از اينكه همه خروجيها را با هم جمع كرد، در يك سوئيچي قرار ميدهد كه اين سوئيچ با استفاده از Sector و با استفاده از Inverter كه به روش SPPWN يا PWL ميآيد و Sector هايش بستهبندي ميشود از يك تا شش (تصوير شماره 9)، بسته به اينكه در كدام Sector بيافتد. همانطور كه در شكل ميبينيد، SPPWN به اين نحو است كه دايرهاي است كه در شش قسمت اندازهگيري ميشود و بسته به اينكه تتا در كدام ناحيه قرار داشته باشد، يكي از اين Sector ها انتخاب ميشود و به عنوان خروجي Sector كه ورودي اين قسمت (شكل شماره 10) و تتا را در اين قسمت اندازهگيري ميكنيم و با استفاده از اين عملگرها انتخاب ميكنيم كه كدام يكي از اينها در كدام Sector قرار است انجام شود.
تصوير شماره (8)
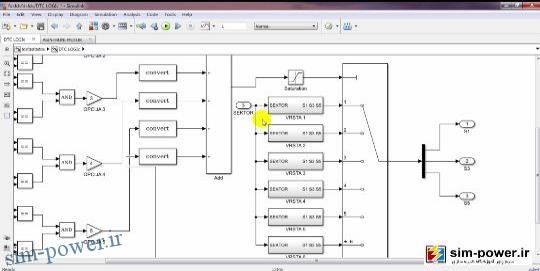
تصوير شماره (9)
تصوير شماره (10)
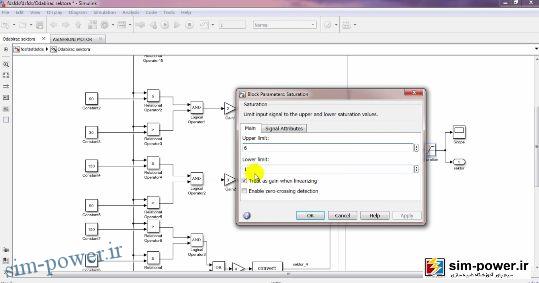
به اين شكل است كه ميگوييم اگر بين 30 تا 30- قرار بگيرد، در Sector اول و همينطور بين 90 تا 150 و براي قسمتهاي بعد هم همينطور Sector ها را اندازهگيري و قسمتبندي ميكنيم و بعد از اينكه اينقسمتها را انجام داديم، طبق آن دايرهاي كه در درس الكترونيك قدرت هم هست، بعد از اينكه Sector بنديها انجام شد و ديديم كه در كدام يكي از اين قسمتها قرار دارد، Sector مان را انتخاب ميكنيم و بعد از آن آنها را با همديگر Add ميكنيم و يك بلوك قرار ميدهيم براي اينكه از يك حدي بيشتر نشود. آخرش را شش گذاشتيم و اولش را يك (تصوير شماره 12)، كه اينها را با همديگر جمع ميكند و عددي بين يك تا شش را به عنوان خروجي اين Sector ها به ما ميدهد كه نشانگر اين است كه در كدام يك از اين Sector ها واقع شده است.
تصوير شماره (11)
تصوير شماره (12)
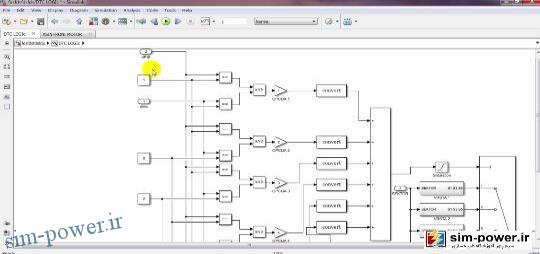
بعد از اينكه اين اعداد يك تا شش انتخاب شد، هر كدام از آنها وارد اين ناحيه ميشود (تصوير شماره 13)، و برايمان انتخاب ميكند. اگر يك بود، ميآيد به قسمت U2 ، و 1،1،0 را در خروجي قرار ميدهد. اگر دو بود، ميآيد 0،1،0 رو انتخاب ميكند كه به اين معني است كه فاز A و C0 و B1 ، U4 در زماني كه اين كنترلر پيشبيني كرد كه قرار است در Sector سه بيافتد و دو فاز اول را 1 و فاز سوم را 0 ميدهد و الي آخر همينطور 6 تا Sector برايمان انتخاب ميشود.
تصوير شماره (13)
هر كدام از اينها به نحوي Sector بندي شده و بسته به اينكه كدام يك از اين Sector ها انتخاب شود، و Select شود، خروجيهايي را برايمان خواهد داشت. در نهايت خروجي را به S1 و S2 و S1 و S3 و S5 خواهد داد كه در اين قسمت ميبينيد.
تصوير شماره (14)
شبيهسازي يك كنترلر موتور به روش پيشبين و به همراه يك DTC
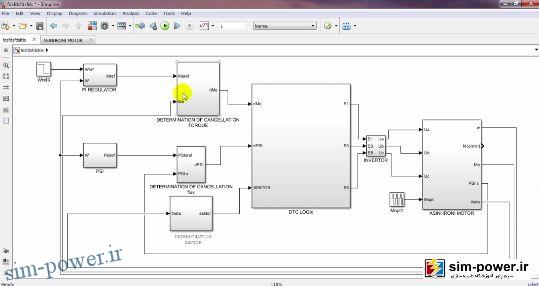
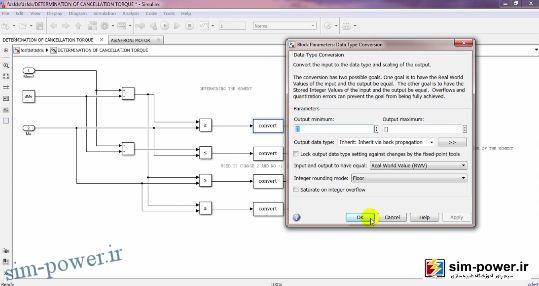
اين قسمت (تصوير شماره 15) براي كنترلر ترك يا گشتآور است كه پيشبيني ميكند كه كدام يك از اين قسمتها را بايد كنترل كنيم (تصوير شماره (16)، كه يك Converter ميگذارد و اين كار را انجام ميدهد.
تصوير شماره (15)
تصوير شماره (16)
همچنين براي كنترل فلاكس يا شار ما يك سيستم كنترلي را در نظر گرفتيم كه اندازه PSI را به صورت قدرمطلق ميگيرد و در صورتي كه از يك حدي كمتر باشد، به Convertor اولي ميدهد و اگر از يك حدي بيشتر باشد، به Convertor دومي ميدهد و در نهايت فلاكس ما كنترل ميشود.
تصوير شماره (17)
قبل از همه اين موارد، قسمتي به نام وجود دارد كه به صورت يك PI درميآيد و Omega را با يك Omega بيس مقايسه ميكنند و اين كنترل را بر روي Omega به صورت PI انجام ميدهند (تصوير شماره 18).
تصوير شماره (18)
يك PSI هم در اين قسمت (تصوير شماره 19) داريم كه كه با گيمهاي كنترلي كه در اين قسمت گذاشتيم و هاييكه برايش تعريف كرديم، در نهايت سيستم كنترلي را خواهد داشت.
تصوير شماره (19)
ميبينيم با اينكه شبيهسازي داراي پيچيدگي زيادي است، با چه سرعت زيادي Run ميشود. دليل اصلي آن، اين است كه موتور آسنكروني كه در اين قسمت (تصوير شماره 20) قرار داديم، به طور كامل شبيهسازي ميشود و با اين شبيهسازي ميتوانيم خروجيهاي مختلفي از اسكوپ بگيريم.

تصوير شماره (20)
نمونهاي از خروجيهاي Sector بندي را در ذيل مشاهده ميكنيم.
تصوير شماره (21)
اگر بياييم خروجيهاي مختلف سيستم كنترلر را مشاهده كنيم، يك PSSI است كه به دليل اينكه سوئيچ بالا هست، ميبايست يك قسمت كوچكتر را انتخاب كنيم. (تصوير شماره 23)
تصوير شماره (22)
تصوير شماره (23)
ميتوانيم در هر قسمتي كه خواستيم اسكوپ قرار دهيم و Omega را ببينيم و هركدام از اينها را ميتوانيم مستقيماً به اسكوپها وصل كنيم و آن را به عنوان خروجي مدار را مشاهده كنيم.

تصوير شماره (24)
تنها نكتهاي كه وجود دارد اين است كه يك سري پارامترها و يك سري كاركترهايي هستند كه بايد قبل از شبيهسازي، Run شوند كه RS، RR، NS هستند كه مربوط به و ساير قسمتهايي هستند كه كه ميتوانيم وارد كنيم و ميزان گشتآور و تعداد قطبها و فركانس برق شهر، كه اينها قبل از شبيهسازي بايد به سيستم داده شوند و براي هر موتور، طوري شبيهسازي كرديم كه هر موتور ميتواند نسبت به موتور ديگر متفاوت قرار بگيرد و هر نوع موتوري را ميتوانيم شبيهسازي كنيم و ساير قسمتهاي مربوط به گردش سنكرون موتور و ساير قسمتها هم در اين قسمت قرار گرفته و كاركترهاي مربوط به Ua، Ub و Uc هم در اين ناحيه قرار داديم كه ميبايست قبل از شبيهسازي اين موارد Run شوند براي اينكه بتوانيم خروجيهايي داشته باشيم به عنوان خروجيهاي سيستممان.
بعد از شبيهسازي هم ميتوانيم اين موارد را Run كنيم و Plut بگيريم و Plut هاي مختلفي را ميبينيد كه در اين قسمت (تصوير شماره 26) قرار دارند.

تصوير شماره (25)

تصوير شماره (26)
اميدواريم كه اين شبيهسازي مورد استفاده شما قرار بگيرد.