آزمایش تورینگ و الگوریتم مسیریابی برای ربات ها
آزمايش تورينگ :
آزمايش تورينگ از قرار دادن انسان و ماشين بطور مستقيم در برابر يكديگر اجتناب مي كند و بدين ترتيب ، چهره و فيزيك انساني مد نظ آزمايش كنندگان نمي باشد . ماشيني كه بتواند از پس آزمون تورينگ برآيد ، از تفكري انساني برخوردار است .
مدل سازي نحوه تفكر انسان ، تنها راه توليد ماشينهاي هوشمند نيست . هم اكنون دو هدف براي توليد ماشينهاي هوشمند ، مدنظر است ، كه تنها يكي از آن دو از الگوي انساني جهت فكر كردن بهره مي برد :
سيستمي كه مانند انسان فكر كند . اين سيستم با مدل كردن مغز انسان و نحوه انديشيدن انسان توليد خواهد شد و لذا از آزمون تورينگ سربلند بيرون مي آيد ، از اين سيستم ممكن است اعمال انساني سربزند.
سيستمي كه عاقلانه فكر كند ، سيستمي عاقل است كه بتواند كارها را درست انجام دهد ، در توليد اين سيستم ها نحوه انديشيدن انسان مد نظر نيست ، اين سيستم ها متكي به قوانين و منظقي هستند كه پايه تفكر آن ها را تشكيل داده و آن ها را قادر به استنتاج و تصميم گيري مي نمايد. آنها با وجود كه مانند انسان نمي انديشند ، تصميماتي عاقلانه گرفته و اشتباه نمي كنند. اين ماشينها لزوما دركي از احساسات ندارند. هم اكنون از اين سيستم ها در توليد Agent
ها در نرم افزارهاي كامپيوتري ، بهره گيري مي شود ، Agent ، تنها مشاهده كرده و سپس عمل مي كند.
Agent قادر به شناسايي الگوها و تصميم گيري براساس قوانين فكر كردن خود است . قوانين و چگونگي فكر كردن هر Agent در راستاي دستياي به هدفش ، تعريف مي شود . اين سيستم ها براساس قوانين خاص خود فكر كرده و كار خود را به درستي انجام مي دهند. پس عاقلانه رفتار مي كنند ، هر چند الزاماٌ مانند انسان فكر نمي كنند.
با وجودي كه برآورده سازي نيازهاي صنايع نظامي ، مهمترين عامل توسعه و رشد هوش مصنوعي بوده است ، هم اكنون از محصولات اين شاخه از علوم در صنايع پزشكي ، رباتيك ، پيش بيني وضع هوا ، نقشه برداري و شناسايي عوارض ، تشخيص صدا و دست خط و بازي ها و نرم افزارهاي كامپيوتري استفاده ميشود.
ربات تعقيب خط ، نوعي از ربات است كه وظيفه اصلي آن تعقيب كردن مسيري به رنگ مثلاٌ سياه در زمينه اي به رنگ متفاوت مشخصي مثلاٌ سفيد است .
يكي از كاربردهاي عمده اين ربات ، حمل و نقل وسايل و كالاهاي مختلف در كارخانجات ، بيمارستان ها ، فروشگاه ها ، كتابخانه ها و … مي باشد.
ربات تعقيب خط تا حدي قادر به انجام وظيفه كتاب داري كتابخانه ها
مي باشد. به اين صورت كه بعد از دادن كد كتاب ، ربات با دنبال كردن مسيري كه كد آن را تعيين مي كند ، به محلي كه كتاب در آن قرار گرفته
مي رود و كتاب را برداشته و به نزد ما مي آورد.
مثال ديگر كاربرد اين نوع ربات در بيمارستان هاي پيشرفته است ، كه بيمارستان هاي پيشرفته خط كشي هايي به رنگ هاي مختلف به منظور هدايت ربات هاي پس فايندر به محل هاي مختلف – مثلا رنگ قرمز به اتاق جراحي يا آبي به اتاق زايمان وجود دارد. بيماراني كه توانايي حركت كردن و جابجا شدن را ندارند و بايد از ويلچر ( ويلچير = wheelchair ) استفاده كنند ، اين ويلچير نقش ربات تعقيب خط را دارد ، و بيمار را از روي مسير مشخص به محل مطلوب مي برد . و خلاصه كاربردهاي فراواني دارد و اگر روزي بشود در زندگي مان بكار بريم ، خيلي كيف دارد.
الگوريتم مسير يابي :
الگوريتم مسيريابي بايد طوري نوشته شود تا ربات بتواند هرگونه مسيري را ، با هر اندازه پيچ و خم دنبال كند ، به طوري كه خطاي آن مينيمم باشد. تجربه نشان مي دهد كه بهترين روش براي يافتن و دنبال كردن مسير ، استفاده از 4 سنسور است . البته با استفاده از حداقل 2 سنسور نيز مي توان ربات مسيرياب ساخت ، ولي قضيه دو دوتا 4 تاست ! يعني با كم كردن سنسور ضريب اطمينان ربات نيز كاهش مي يابد. ( اتفاقا اصلا اين قضيه صادق نبود ، احتمالاٌ تغيير هر چقدر پول بدي ، متراژ بيشتري پيترا متري مي خوري مناسب تر باشد !)
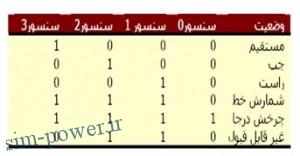
وظيفه سنسورهاي 1 و 2 تشخيص پيچ هاي مسير و سنسور 3 مقدار چرخش ربات به جهات مختلف را تعيين مي كند.
يعني زماني كه سنسور 3 در زمينه سفيد قرار گرفت ، چرخ هاي ربات آن قدر به سمت چپ يا راست مي چرخند تا سسنسور شماره 3 روي خط سياه قرار گيرد. يكي از دلايل سنسور سوم موجود انتهاي مسير و چرخش 180 درجه ربات و برگشتن است . در ضمن اين سنسور باعث مي شود كه ربات
سريع تر پيچ ها را ببيند و خطاي منحرف شدن از خط در سر پيچ ها به حداقل مي رسد. همچنين اگر خطوطي عمود بر خط مستقيم و شمارش اين خطوط به نوعي مفيد باشد ، توسط سنسورهاي 1 و 2 به همراه 3 انجام مي شود ، به اين صورت كه اگر سنسورهاي 1 و 2 و 3 هر سه سياه بود ، يعني ربات از يك خط عمود بر خط مستقيم عبور كرده است .
براي درك بهتر نحوه عملكرد سنسورها و ارتباط آن با وضعيت چرخ هاي ربات به جدول زير نگاه كنيد :
بايد توجه داشت كه اگر از سنسورهاي LDR در ربات استفاده شد. نور محيط ثابت باشد ، طوريكه نور تابيده شده به سنسورها در ابتداي و انتهاي مسير تفاوت چنداني نداشته باشد. زيرا در غير اينصورت در عملكرد ربات اختلال ايجاد مي شود.
براي رفع اين مشكل اصول لامپ هاي LDR با لامپ هاي حبابي استفاده مي شود كه منجر به يكنواخت شدن نور محيط مي گردد.